实时人体动作捕捉、重建和肌肉骨骼分析
IF 2.4
2区 工程技术
Q2 MECHANICS
引用次数: 0
摘要
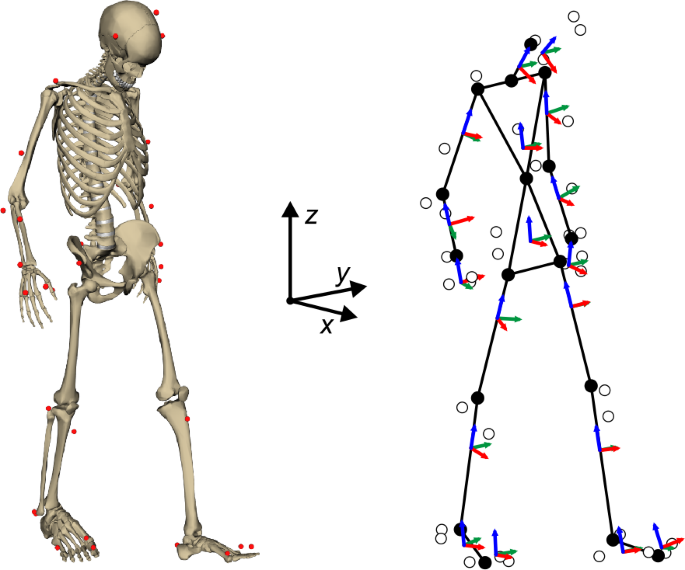
光学运动捕捉是研究和分析人体运动的重要工具。目前,大多数动作捕捉系统的制造商都提供了实时重建运动的软件应用程序,从而允许实时可视化。捕获的运动学数据可以作为输入数据用于进一步的肌肉骨骼分析。然而,在先进的生物反馈应用中,上述分析的结果,如关节扭矩、地面反作用力、肌肉努力和关节反作用力,也需要实时的。在这项工作中,作者先前开发的用于实时,全身运动捕获和重建的扩展卡尔曼滤波器(EKF)通过逆动力学和肌肉努力优化得到增强,从而在捕获运动时实现后者以及关节反作用力的计算和可视化。现有动作捕捉算法的改进版本提供了每个时间步的位置、速度和加速度。然后,通过求解反动力学问题,利用力板测量以及先前估计的体段参数计算关节扭矩。一旦获得了关节扭矩,就解决了优化问题,以便在最小化目标函数的同时获得提供所述扭矩的肌肉力。这是通过一个非常有效的二次规划算法来实现的,这个算法完全针对这个特定的问题进行了调整。通过该程序,可以捕获和标记光学标记,重建模型的运动,求解逆动力学,并估计单个肌肉力,同时提供结果的实时可视化。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Human motion capture, reconstruction, and musculoskeletal analysis in real time
Abstract Optical motion capture is an essential tool for the study and analysis of human movement. Currently, most manufacturers of motion-capture systems provide software applications for reconstructing the movement in real time, thus allowing for on-the-fly visualization. The captured kinematics can be later used as input data for a further musculoskeletal analysis. However, in advanced biofeedback applications, the results of said analysis, such as joint torques, ground-reaction forces, muscle efforts, and joint-reaction forces, are also required in real time. In this work, an extended Kalman filter (EKF) previously developed by the authors for real-time, whole-body motion capture and reconstruction is augmented with inverse dynamics and muscle-efforts optimization, enabling the calculation and visualization of the latter, along with joint-reaction forces, while capturing the motion. A modified version of the existing motion-capture algorithm provides the positions, velocities, and accelerations at every time step. Then, the joint torques are calculated by solving the inverse-dynamics problem, using force-plate measurements along with previously estimated body-segment parameters. Once the joint torques are obtained, an optimization problem is solved, in order to obtain the muscle forces that provide said torques while minimizing an objective function. This is achieved by a very efficient quadratic programming algorithm, thoroughly tuned for this specific problem. With this procedure, it is possible to capture and label the optical markers, reconstruct the motion of the model, solve the inverse dynamics, and estimate the individual muscle forces, all while providing real-time visualization of the results.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

CiteScore
6.00
自引率
17.60%
发文量
46
审稿时长
12 months
期刊介绍:
The journal Multibody System Dynamics treats theoretical and computational methods in rigid and flexible multibody systems, their application, and the experimental procedures used to validate the theoretical foundations.
The research reported addresses computational and experimental aspects and their application to classical and emerging fields in science and technology. Both development and application aspects of multibody dynamics are relevant, in particular in the fields of control, optimization, real-time simulation, parallel computation, workspace and path planning, reliability, and durability. The journal also publishes articles covering application fields such as vehicle dynamics, aerospace technology, robotics and mechatronics, machine dynamics, crashworthiness, biomechanics, artificial intelligence, and system identification if they involve or contribute to the field of Multibody System Dynamics.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


