Amine Elhafsi, Rohan Sinha, Christopher Agia, Edward Schmerling, Issa A. D. Nesnas, Marco Pavone
{"title":"基于大型语言模型的语义异常检测","authors":"Amine Elhafsi, Rohan Sinha, Christopher Agia, Edward Schmerling, Issa A. D. Nesnas, Marco Pavone","doi":"10.1007/s10514-023-10132-6","DOIUrl":null,"url":null,"abstract":"<div><p>As robots acquire increasingly sophisticated skills and see increasingly complex and varied environments, the threat of an edge case or anomalous failure is ever present. For example, Tesla cars have seen interesting failure modes ranging from autopilot disengagements due to inactive traffic lights carried by trucks to phantom braking caused by images of stop signs on roadside billboards. These system-level failures are not due to failures of any individual component of the autonomy stack but rather system-level deficiencies in semantic reasoning. Such edge cases, which we call <i>semantic anomalies</i>, are simple for a human to disentangle yet require insightful reasoning. To this end, we study the application of large language models (LLMs), endowed with broad contextual understanding and reasoning capabilities, to recognize such edge cases and introduce a monitoring framework for semantic anomaly detection in vision-based policies. Our experiments apply this framework to a finite state machine policy for autonomous driving and a learned policy for object manipulation. These experiments demonstrate that the LLM-based monitor can effectively identify semantic anomalies in a manner that shows agreement with human reasoning. Finally, we provide an extended discussion on the strengths and weaknesses of this approach and motivate a research outlook on how we can further use foundation models for semantic anomaly detection. Our project webpage can be found at https://sites.google.com/view/llm-anomaly-detection. \n</p></div>","PeriodicalId":55409,"journal":{"name":"Autonomous Robots","volume":"47 8","pages":"1035 - 1055"},"PeriodicalIF":4.3000,"publicationDate":"2023-10-23","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"5","resultStr":"{\"title\":\"Semantic anomaly detection with large language models\",\"authors\":\"Amine Elhafsi, Rohan Sinha, Christopher Agia, Edward Schmerling, Issa A. D. Nesnas, Marco Pavone\",\"doi\":\"10.1007/s10514-023-10132-6\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>As robots acquire increasingly sophisticated skills and see increasingly complex and varied environments, the threat of an edge case or anomalous failure is ever present. For example, Tesla cars have seen interesting failure modes ranging from autopilot disengagements due to inactive traffic lights carried by trucks to phantom braking caused by images of stop signs on roadside billboards. These system-level failures are not due to failures of any individual component of the autonomy stack but rather system-level deficiencies in semantic reasoning. Such edge cases, which we call <i>semantic anomalies</i>, are simple for a human to disentangle yet require insightful reasoning. To this end, we study the application of large language models (LLMs), endowed with broad contextual understanding and reasoning capabilities, to recognize such edge cases and introduce a monitoring framework for semantic anomaly detection in vision-based policies. Our experiments apply this framework to a finite state machine policy for autonomous driving and a learned policy for object manipulation. These experiments demonstrate that the LLM-based monitor can effectively identify semantic anomalies in a manner that shows agreement with human reasoning. Finally, we provide an extended discussion on the strengths and weaknesses of this approach and motivate a research outlook on how we can further use foundation models for semantic anomaly detection. Our project webpage can be found at https://sites.google.com/view/llm-anomaly-detection. \\n</p></div>\",\"PeriodicalId\":55409,\"journal\":{\"name\":\"Autonomous Robots\",\"volume\":\"47 8\",\"pages\":\"1035 - 1055\"},\"PeriodicalIF\":4.3000,\"publicationDate\":\"2023-10-23\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"5\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Autonomous Robots\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://link.springer.com/article/10.1007/s10514-023-10132-6\",\"RegionNum\":3,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Autonomous Robots","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s10514-023-10132-6","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
Semantic anomaly detection with large language models
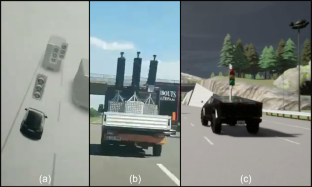
As robots acquire increasingly sophisticated skills and see increasingly complex and varied environments, the threat of an edge case or anomalous failure is ever present. For example, Tesla cars have seen interesting failure modes ranging from autopilot disengagements due to inactive traffic lights carried by trucks to phantom braking caused by images of stop signs on roadside billboards. These system-level failures are not due to failures of any individual component of the autonomy stack but rather system-level deficiencies in semantic reasoning. Such edge cases, which we call semantic anomalies, are simple for a human to disentangle yet require insightful reasoning. To this end, we study the application of large language models (LLMs), endowed with broad contextual understanding and reasoning capabilities, to recognize such edge cases and introduce a monitoring framework for semantic anomaly detection in vision-based policies. Our experiments apply this framework to a finite state machine policy for autonomous driving and a learned policy for object manipulation. These experiments demonstrate that the LLM-based monitor can effectively identify semantic anomalies in a manner that shows agreement with human reasoning. Finally, we provide an extended discussion on the strengths and weaknesses of this approach and motivate a research outlook on how we can further use foundation models for semantic anomaly detection. Our project webpage can be found at https://sites.google.com/view/llm-anomaly-detection.
期刊介绍:
Autonomous Robots reports on the theory and applications of robotic systems capable of some degree of self-sufficiency. It features papers that include performance data on actual robots in the real world. Coverage includes: control of autonomous robots · real-time vision · autonomous wheeled and tracked vehicles · legged vehicles · computational architectures for autonomous systems · distributed architectures for learning, control and adaptation · studies of autonomous robot systems · sensor fusion · theory of autonomous systems · terrain mapping and recognition · self-calibration and self-repair for robots · self-reproducing intelligent structures · genetic algorithms as models for robot development.
The focus is on the ability to move and be self-sufficient, not on whether the system is an imitation of biology. Of course, biological models for robotic systems are of major interest to the journal since living systems are prototypes for autonomous behavior.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


