Naruki Yoshikawa, Marta Skreta, Kourosh Darvish, Sebastian Arellano-Rubach, Zhi Ji, Lasse Bjørn Kristensen, Andrew Zou Li, Yuchi Zhao, Haoping Xu, Artur Kuramshin, Alán Aspuru-Guzik, Florian Shkurti, Animesh Garg
{"title":"用于化学机器人的大型语言模型","authors":"Naruki Yoshikawa, Marta Skreta, Kourosh Darvish, Sebastian Arellano-Rubach, Zhi Ji, Lasse Bjørn Kristensen, Andrew Zou Li, Yuchi Zhao, Haoping Xu, Artur Kuramshin, Alán Aspuru-Guzik, Florian Shkurti, Animesh Garg","doi":"10.1007/s10514-023-10136-2","DOIUrl":null,"url":null,"abstract":"<div><p>This paper proposes an approach to automate chemistry experiments using robots by translating natural language instructions into robot-executable plans, using large language models together with task and motion planning. Adding natural language interfaces to autonomous chemistry experiment systems lowers the barrier to using complicated robotics systems and increases utility for non-expert users, but translating natural language experiment descriptions from users into low-level robotics languages is nontrivial. Furthermore, while recent advances have used large language models to generate task plans, reliably executing those plans in the real world by an embodied agent remains challenging. To enable autonomous chemistry experiments and alleviate the workload of chemists, robots must interpret natural language commands, perceive the workspace, autonomously plan multi-step actions and motions, consider safety precautions, and interact with various laboratory equipment. Our approach, <span>CLAIRify</span>, combines automatic iterative prompting with program verification to ensure syntactically valid programs in a data-scarce domain-specific language that incorporates environmental constraints. The generated plan is executed through solving a constrained task and motion planning problem using PDDLStream solvers to prevent spillages of liquids as well as collisions in chemistry labs. We demonstrate the effectiveness of our approach in planning chemistry experiments, with plans successfully executed on a real robot using a repertoire of robot skills and lab tools. Specifically, we showcase the utility of our framework in pouring skills for various materials and two fundamental chemical experiments for materials synthesis: solubility and recrystallization. Further details about <span>CLAIRify</span> can be found at https://ac-rad.github.io/clairify/.</p></div>","PeriodicalId":55409,"journal":{"name":"Autonomous Robots","volume":"47 8","pages":"1057 - 1086"},"PeriodicalIF":4.3000,"publicationDate":"2023-10-25","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://link.springer.com/content/pdf/10.1007/s10514-023-10136-2.pdf","citationCount":"0","resultStr":"{\"title\":\"Large language models for chemistry robotics\",\"authors\":\"Naruki Yoshikawa, Marta Skreta, Kourosh Darvish, Sebastian Arellano-Rubach, Zhi Ji, Lasse Bjørn Kristensen, Andrew Zou Li, Yuchi Zhao, Haoping Xu, Artur Kuramshin, Alán Aspuru-Guzik, Florian Shkurti, Animesh Garg\",\"doi\":\"10.1007/s10514-023-10136-2\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>This paper proposes an approach to automate chemistry experiments using robots by translating natural language instructions into robot-executable plans, using large language models together with task and motion planning. Adding natural language interfaces to autonomous chemistry experiment systems lowers the barrier to using complicated robotics systems and increases utility for non-expert users, but translating natural language experiment descriptions from users into low-level robotics languages is nontrivial. Furthermore, while recent advances have used large language models to generate task plans, reliably executing those plans in the real world by an embodied agent remains challenging. To enable autonomous chemistry experiments and alleviate the workload of chemists, robots must interpret natural language commands, perceive the workspace, autonomously plan multi-step actions and motions, consider safety precautions, and interact with various laboratory equipment. Our approach, <span>CLAIRify</span>, combines automatic iterative prompting with program verification to ensure syntactically valid programs in a data-scarce domain-specific language that incorporates environmental constraints. The generated plan is executed through solving a constrained task and motion planning problem using PDDLStream solvers to prevent spillages of liquids as well as collisions in chemistry labs. We demonstrate the effectiveness of our approach in planning chemistry experiments, with plans successfully executed on a real robot using a repertoire of robot skills and lab tools. Specifically, we showcase the utility of our framework in pouring skills for various materials and two fundamental chemical experiments for materials synthesis: solubility and recrystallization. Further details about <span>CLAIRify</span> can be found at https://ac-rad.github.io/clairify/.</p></div>\",\"PeriodicalId\":55409,\"journal\":{\"name\":\"Autonomous Robots\",\"volume\":\"47 8\",\"pages\":\"1057 - 1086\"},\"PeriodicalIF\":4.3000,\"publicationDate\":\"2023-10-25\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://link.springer.com/content/pdf/10.1007/s10514-023-10136-2.pdf\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Autonomous Robots\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://link.springer.com/article/10.1007/s10514-023-10136-2\",\"RegionNum\":3,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Autonomous Robots","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s10514-023-10136-2","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
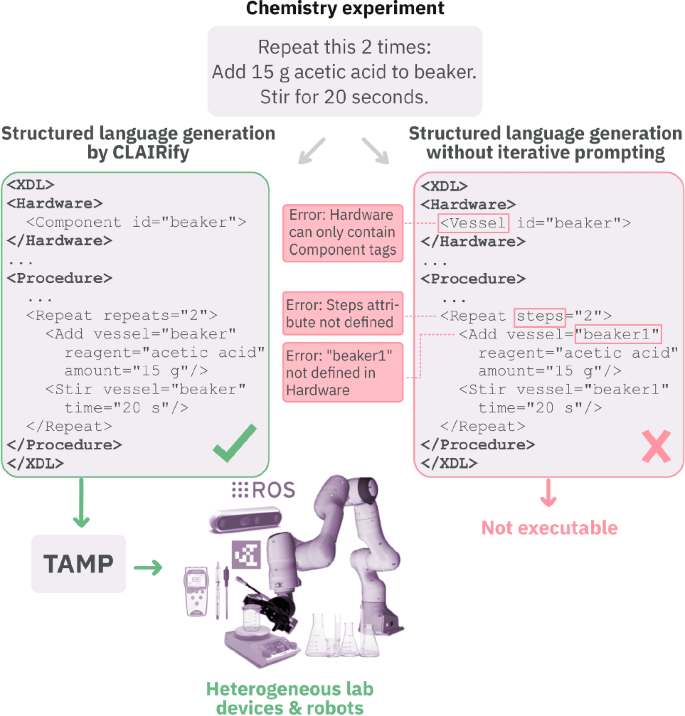
This paper proposes an approach to automate chemistry experiments using robots by translating natural language instructions into robot-executable plans, using large language models together with task and motion planning. Adding natural language interfaces to autonomous chemistry experiment systems lowers the barrier to using complicated robotics systems and increases utility for non-expert users, but translating natural language experiment descriptions from users into low-level robotics languages is nontrivial. Furthermore, while recent advances have used large language models to generate task plans, reliably executing those plans in the real world by an embodied agent remains challenging. To enable autonomous chemistry experiments and alleviate the workload of chemists, robots must interpret natural language commands, perceive the workspace, autonomously plan multi-step actions and motions, consider safety precautions, and interact with various laboratory equipment. Our approach, CLAIRify, combines automatic iterative prompting with program verification to ensure syntactically valid programs in a data-scarce domain-specific language that incorporates environmental constraints. The generated plan is executed through solving a constrained task and motion planning problem using PDDLStream solvers to prevent spillages of liquids as well as collisions in chemistry labs. We demonstrate the effectiveness of our approach in planning chemistry experiments, with plans successfully executed on a real robot using a repertoire of robot skills and lab tools. Specifically, we showcase the utility of our framework in pouring skills for various materials and two fundamental chemical experiments for materials synthesis: solubility and recrystallization. Further details about CLAIRify can be found at https://ac-rad.github.io/clairify/.
期刊介绍:
Autonomous Robots reports on the theory and applications of robotic systems capable of some degree of self-sufficiency. It features papers that include performance data on actual robots in the real world. Coverage includes: control of autonomous robots · real-time vision · autonomous wheeled and tracked vehicles · legged vehicles · computational architectures for autonomous systems · distributed architectures for learning, control and adaptation · studies of autonomous robot systems · sensor fusion · theory of autonomous systems · terrain mapping and recognition · self-calibration and self-repair for robots · self-reproducing intelligent structures · genetic algorithms as models for robot development.
The focus is on the ability to move and be self-sufficient, not on whether the system is an imitation of biology. Of course, biological models for robotic systems are of major interest to the journal since living systems are prototypes for autonomous behavior.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


