Exudyn——一个基于c++的Python包,用于灵活的多体系统
IF 2.4
2区 工程技术
Q2 MECHANICS
引用次数: 2
摘要
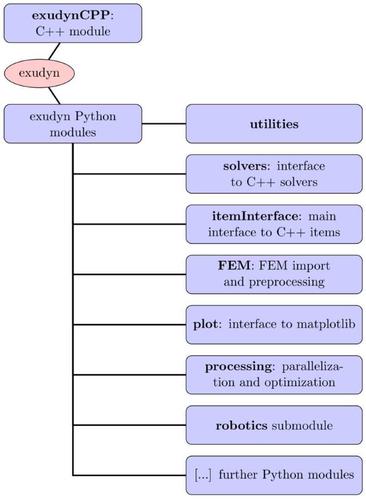
本文介绍了自2019年以来开发的开源多体动力学代码Exudyn的设计、方法、功能和功能。该代码为刚性和柔性多体系统设计,重点关注多核桌面处理器的性能。它包括基于脚本语言的建模,旨在用于科学和教育,但也用于工业。源代码可在GitHub上获得,它由一个主要的c++核心,一个丰富的Python接口(包括Python中的预处理和后处理模块)以及具有适当关节,负载和传感器功能的刚性和柔性体的集合组成。集成求解器允许显式和隐式时间集成,静态解决方案,特征值分析和优化。本文讨论了代码设计、结构、计算核心、计算对象和多体公式。此外,还以刚体和柔性多体系统为例对该方法的计算性能进行了评价。结果显示了多线程的显著影响,特别是对于小型系统,但对于较大的模型也是如此。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Exudyn – a C++-based Python package for flexible multibody systems
Abstract The present contribution introduces the design, methods, functionalities, and capabilities of the open-source multibody dynamics code Exudyn, which has been developed since 2019. The code has been designed for rigid and flexible multibody systems, with a focus on performance for multicore desktop processors. It includes script-language-based modeling and it is intended to be used in science and education, but also in industry. The open-source code is available on GitHub and consists of a main C++ core, a rich Python interface including pre- and postprocessing modules in Python, and a collection of rigid and flexible bodies with appropriate joint, load, and sensor functionality. Integrated solvers allow explicit and implicit time integration, static solution, eigenvalue analysis, and optimization. In the paper, the code design, structure, computational core, computational objects, and multibody formulations are addressed. In addition, the computational performance is evaluated with examples of rigid and flexible multibody systems. The results show the significant impact of multithreading especially for small systems, but also for larger models.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

CiteScore
6.00
自引率
17.60%
发文量
46
审稿时长
12 months
期刊介绍:
The journal Multibody System Dynamics treats theoretical and computational methods in rigid and flexible multibody systems, their application, and the experimental procedures used to validate the theoretical foundations.
The research reported addresses computational and experimental aspects and their application to classical and emerging fields in science and technology. Both development and application aspects of multibody dynamics are relevant, in particular in the fields of control, optimization, real-time simulation, parallel computation, workspace and path planning, reliability, and durability. The journal also publishes articles covering application fields such as vehicle dynamics, aerospace technology, robotics and mechatronics, machine dynamics, crashworthiness, biomechanics, artificial intelligence, and system identification if they involve or contribute to the field of Multibody System Dynamics.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


