{"title":"一种针对眼科手术的被动手术支持机器人的定制和初步评估。","authors":"Soichiro Yamamoto, Yohei Kuroki, Toshihiro Ide, Shin Tanaka, Rintaro Hirahara, Ayako Takamori, Tomohisa Nishimura, Kiyoshi Suzuma, Kazuaki Kadonosono, Hiroshi Enaida","doi":"10.1007/s10384-023-01017-3","DOIUrl":null,"url":null,"abstract":"<p><strong>Purpose: </strong>To customize a passive surgery support robot for ophthalmic surgery and preliminarily evaluate its performance.</p><p><strong>Study design: </strong>Prospective observational study.</p><p><strong>Methods: </strong>The range of motion of the arm was analyzed during ophthalmic surgery and, based on this analysis, a commercially available passive robot was customized for surgical support for ophthalmic surgery; following which a prototype robot was constructed. To examine the effects on the brachial muscle during surgical operations with and without the prototype robot, surface electromyograms of the biceps and triceps were analyzed after performing continuous curvilinear capsulorrhexis (CCC) and suturing the sclerocorneal wound in a cataract surgery simulation. Six surgeons performed cataract surgery, and the degree of arm stability and muscle fatigue during surgery were evaluated using a visual analog scale.</p><p><strong>Results: </strong>During surgery, the prototype robot enabled fixation of the elbow and wrist at any position within the surgeon's range of motion, expanding the range of motion of the hand and fingers and stabilizing operability. Surface electromyography showed a significant decrease in the mean amplitude value of the biceps brachii during both CCC and suturing (p < 0.0001). No significant difference was observed in the triceps brachii. The arm stability and muscle fatigue were improved by 83.3% on the visual analog scale with the prototype robot compared with that without protpotype robot.</p><p><strong>Conclusion: </strong>The use of a passive prototype robot may improve arm stability and reduce muscle fatigue during ophthalmic surgery.</p>","PeriodicalId":14563,"journal":{"name":"Japanese Journal of Ophthalmology","volume":null,"pages":null},"PeriodicalIF":2.1000,"publicationDate":"2023-11-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Customization of a passive surgical support robot to specifications for ophthalmic surgery and preliminary evaluation.\",\"authors\":\"Soichiro Yamamoto, Yohei Kuroki, Toshihiro Ide, Shin Tanaka, Rintaro Hirahara, Ayako Takamori, Tomohisa Nishimura, Kiyoshi Suzuma, Kazuaki Kadonosono, Hiroshi Enaida\",\"doi\":\"10.1007/s10384-023-01017-3\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><strong>Purpose: </strong>To customize a passive surgery support robot for ophthalmic surgery and preliminarily evaluate its performance.</p><p><strong>Study design: </strong>Prospective observational study.</p><p><strong>Methods: </strong>The range of motion of the arm was analyzed during ophthalmic surgery and, based on this analysis, a commercially available passive robot was customized for surgical support for ophthalmic surgery; following which a prototype robot was constructed. To examine the effects on the brachial muscle during surgical operations with and without the prototype robot, surface electromyograms of the biceps and triceps were analyzed after performing continuous curvilinear capsulorrhexis (CCC) and suturing the sclerocorneal wound in a cataract surgery simulation. Six surgeons performed cataract surgery, and the degree of arm stability and muscle fatigue during surgery were evaluated using a visual analog scale.</p><p><strong>Results: </strong>During surgery, the prototype robot enabled fixation of the elbow and wrist at any position within the surgeon's range of motion, expanding the range of motion of the hand and fingers and stabilizing operability. Surface electromyography showed a significant decrease in the mean amplitude value of the biceps brachii during both CCC and suturing (p < 0.0001). No significant difference was observed in the triceps brachii. The arm stability and muscle fatigue were improved by 83.3% on the visual analog scale with the prototype robot compared with that without protpotype robot.</p><p><strong>Conclusion: </strong>The use of a passive prototype robot may improve arm stability and reduce muscle fatigue during ophthalmic surgery.</p>\",\"PeriodicalId\":14563,\"journal\":{\"name\":\"Japanese Journal of Ophthalmology\",\"volume\":null,\"pages\":null},\"PeriodicalIF\":2.1000,\"publicationDate\":\"2023-11-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Japanese Journal of Ophthalmology\",\"FirstCategoryId\":\"3\",\"ListUrlMain\":\"https://doi.org/10.1007/s10384-023-01017-3\",\"RegionNum\":3,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2023/8/10 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q2\",\"JCRName\":\"OPHTHALMOLOGY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Japanese Journal of Ophthalmology","FirstCategoryId":"3","ListUrlMain":"https://doi.org/10.1007/s10384-023-01017-3","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2023/8/10 0:00:00","PubModel":"Epub","JCR":"Q2","JCRName":"OPHTHALMOLOGY","Score":null,"Total":0}
Customization of a passive surgical support robot to specifications for ophthalmic surgery and preliminary evaluation.
Purpose: To customize a passive surgery support robot for ophthalmic surgery and preliminarily evaluate its performance.
Study design: Prospective observational study.
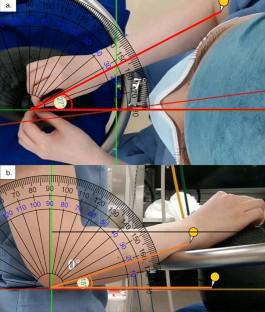
Methods: The range of motion of the arm was analyzed during ophthalmic surgery and, based on this analysis, a commercially available passive robot was customized for surgical support for ophthalmic surgery; following which a prototype robot was constructed. To examine the effects on the brachial muscle during surgical operations with and without the prototype robot, surface electromyograms of the biceps and triceps were analyzed after performing continuous curvilinear capsulorrhexis (CCC) and suturing the sclerocorneal wound in a cataract surgery simulation. Six surgeons performed cataract surgery, and the degree of arm stability and muscle fatigue during surgery were evaluated using a visual analog scale.
Results: During surgery, the prototype robot enabled fixation of the elbow and wrist at any position within the surgeon's range of motion, expanding the range of motion of the hand and fingers and stabilizing operability. Surface electromyography showed a significant decrease in the mean amplitude value of the biceps brachii during both CCC and suturing (p < 0.0001). No significant difference was observed in the triceps brachii. The arm stability and muscle fatigue were improved by 83.3% on the visual analog scale with the prototype robot compared with that without protpotype robot.
Conclusion: The use of a passive prototype robot may improve arm stability and reduce muscle fatigue during ophthalmic surgery.
期刊介绍:
The Japanese Journal of Ophthalmology (JJO) was inaugurated in 1957 as a quarterly journal published in English by the Ophthalmology Department of the University of Tokyo, with the aim of disseminating the achievements of Japanese ophthalmologists worldwide. JJO remains the only Japanese ophthalmology journal published in English. In 1997, the Japanese Ophthalmological Society assumed the responsibility for publishing the Japanese Journal of Ophthalmology as its official English-language publication.
Currently the journal is published bimonthly and accepts papers from authors worldwide. JJO has become an international interdisciplinary forum for the publication of basic science and clinical research papers.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


