Xiaolei Cao, Xiao Huang, Yan Zhao, Zeyuan Sun, Hui Li, Zhihong Jiang, Marco Ceccarelli
{"title":"基于变导纳控制的仿人柔性装配空间维修方法。","authors":"Xiaolei Cao, Xiao Huang, Yan Zhao, Zeyuan Sun, Hui Li, Zhihong Jiang, Marco Ceccarelli","doi":"10.34133/cbsystems.0046","DOIUrl":null,"url":null,"abstract":"<p><p>On-orbit assembly has become a crucial aspect of space operations, where the manipulator frequently and directly interacts with objects in a complex assembly process. The traditional manipulator control has limitations in adapting to diverse assembly tasks and is vulnerable to vibration, leading to assembly failure. To address this issue, we propose a human-like variable admittance control method based on the variable damping characteristics of the human arm. By collecting the velocity and contact force of human arm operations in assembly, we analyze the damping change of human arm and establish the active compliance model based on S-type damping variation rule in assembly. Furthermore, 3 passive contact models are proposed between the end of the human arm and the environment: one-sided bevel contact, both sides bevel contact, and pin-hole contact. On the basis of these active and passive models, a typical space assembly task for a robot is designed, and a human-like variable admittance controller is established and simulated. Finally, we build a ground verification platform and complete different assembly tasks, thereby successfully verifying the safety, robustness, and adaptability of the human-like variable admittance control method.</p>","PeriodicalId":72764,"journal":{"name":"Cyborg and bionic systems (Washington, D.C.)","volume":"4 ","pages":"0046"},"PeriodicalIF":18.1000,"publicationDate":"2023-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10482162/pdf/","citationCount":"0","resultStr":"{\"title\":\"A Method of Human-Like Compliant Assembly Based on Variable Admittance Control for Space Maintenance.\",\"authors\":\"Xiaolei Cao, Xiao Huang, Yan Zhao, Zeyuan Sun, Hui Li, Zhihong Jiang, Marco Ceccarelli\",\"doi\":\"10.34133/cbsystems.0046\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>On-orbit assembly has become a crucial aspect of space operations, where the manipulator frequently and directly interacts with objects in a complex assembly process. The traditional manipulator control has limitations in adapting to diverse assembly tasks and is vulnerable to vibration, leading to assembly failure. To address this issue, we propose a human-like variable admittance control method based on the variable damping characteristics of the human arm. By collecting the velocity and contact force of human arm operations in assembly, we analyze the damping change of human arm and establish the active compliance model based on S-type damping variation rule in assembly. Furthermore, 3 passive contact models are proposed between the end of the human arm and the environment: one-sided bevel contact, both sides bevel contact, and pin-hole contact. On the basis of these active and passive models, a typical space assembly task for a robot is designed, and a human-like variable admittance controller is established and simulated. Finally, we build a ground verification platform and complete different assembly tasks, thereby successfully verifying the safety, robustness, and adaptability of the human-like variable admittance control method.</p>\",\"PeriodicalId\":72764,\"journal\":{\"name\":\"Cyborg and bionic systems (Washington, D.C.)\",\"volume\":\"4 \",\"pages\":\"0046\"},\"PeriodicalIF\":18.1000,\"publicationDate\":\"2023-01-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10482162/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Cyborg and bionic systems (Washington, D.C.)\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.34133/cbsystems.0046\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ENGINEERING, BIOMEDICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Cyborg and bionic systems (Washington, D.C.)","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.34133/cbsystems.0046","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
A Method of Human-Like Compliant Assembly Based on Variable Admittance Control for Space Maintenance.
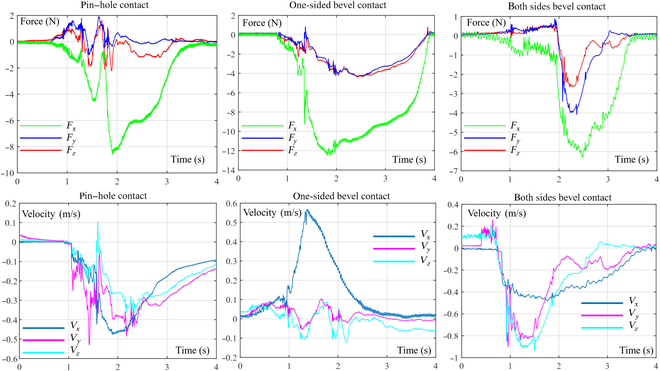
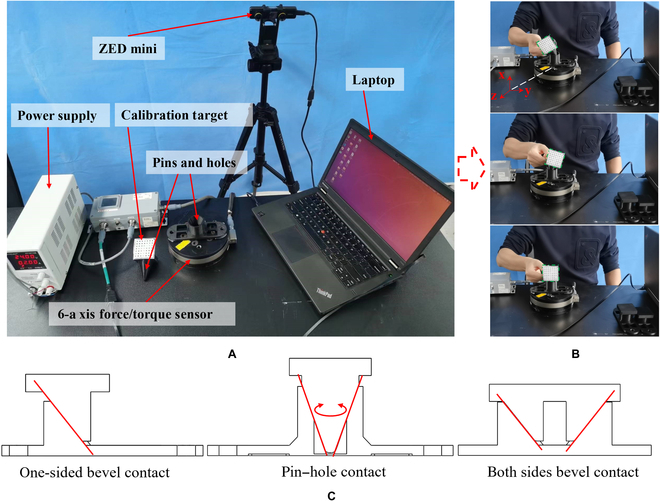
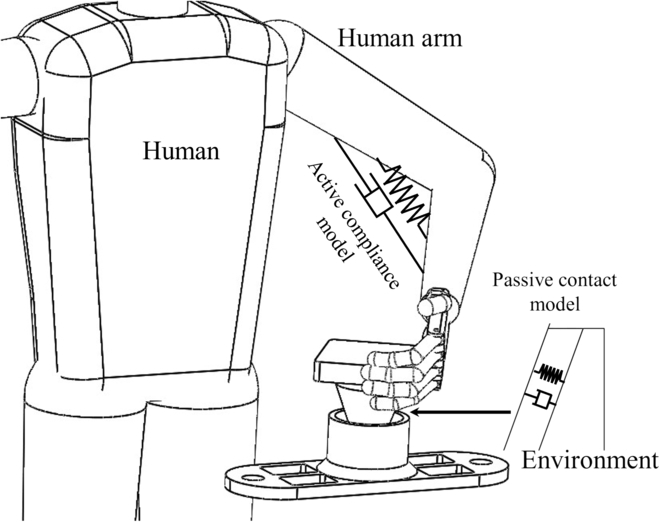
On-orbit assembly has become a crucial aspect of space operations, where the manipulator frequently and directly interacts with objects in a complex assembly process. The traditional manipulator control has limitations in adapting to diverse assembly tasks and is vulnerable to vibration, leading to assembly failure. To address this issue, we propose a human-like variable admittance control method based on the variable damping characteristics of the human arm. By collecting the velocity and contact force of human arm operations in assembly, we analyze the damping change of human arm and establish the active compliance model based on S-type damping variation rule in assembly. Furthermore, 3 passive contact models are proposed between the end of the human arm and the environment: one-sided bevel contact, both sides bevel contact, and pin-hole contact. On the basis of these active and passive models, a typical space assembly task for a robot is designed, and a human-like variable admittance controller is established and simulated. Finally, we build a ground verification platform and complete different assembly tasks, thereby successfully verifying the safety, robustness, and adaptability of the human-like variable admittance control method.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


