{"title":"A mathematical method to estimate angle and distance for percutaneous renal puncture based on computed tomography data: Description and validation.","authors":"Shady Mohamed Salem, Saad A Aldousari","doi":"10.4103/ua.ua_82_22","DOIUrl":null,"url":null,"abstract":"<p><strong>Introduction: </strong>Gaining access to the kidney is crucial step in percutaneous nephrolithotomy (PCNL); it has a steep learning curve.</p><p><strong>Objective: </strong>Describe the mathematical method to predict renal puncture angle and distance based on preoperative computed tomography (CT) measurements. Then evaluating how it correlates with measured values.</p><p><strong>Patients and methods: </strong>The study was prospectively designed. After ethical committee approval, the study uses data from preoperative CT to construct a triangle so we can estimate puncture depth and angle. A triangle of three points, the first is point of entry to the pelvicalyceal system (PCS), the second is point on the skin perpendicular to it, and the third where the needle punctures the skin. The needle travel is estimated using the Pythagorean theorem and puncture angle using the inverse sine function. We evaluated 40 punctures in 36 PCNL procedures. After PCS puncture using fluoroscopy-guided triangulation, we measured the needle travel distance and angle to the horizontal plane. Then compared the results with mathematically estimated values.</p><p><strong>Results: </strong>We targeted posterior lower calyx in 21 (70%) case. The correlation between measured and estimated needle travel distance with Rho coefficient of 0.76 with <i>P</i> < 0.001. The mean difference between the estimated and the measured needle travel was - 0.37 ± 1.2 cm (-2.6-1.6). Measured and estimated angle correlate with Rho coefficient of 0.77 and <i>P</i> < 0.001. The mean difference between the estimated and the measured angle was 2° ± 8° (-21°-16°).</p><p><strong>Conclusion: </strong>Mathematical estimation of needle depth and angle for gaining access to the kidney correlates well with measured values.</p>","PeriodicalId":23633,"journal":{"name":"Urology Annals","volume":"15 2","pages":"197-201"},"PeriodicalIF":0.8000,"publicationDate":"2023-04-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://ftp.ncbi.nlm.nih.gov/pub/pmc/oa_pdf/7b/99/UA-15-197.PMC10252774.pdf","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Urology Annals","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.4103/ua.ua_82_22","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2023/1/16 0:00:00","PubModel":"Epub","JCR":"Q4","JCRName":"UROLOGY & NEPHROLOGY","Score":null,"Total":0}
引用次数: 0
Abstract
Introduction: Gaining access to the kidney is crucial step in percutaneous nephrolithotomy (PCNL); it has a steep learning curve.
Objective: Describe the mathematical method to predict renal puncture angle and distance based on preoperative computed tomography (CT) measurements. Then evaluating how it correlates with measured values.
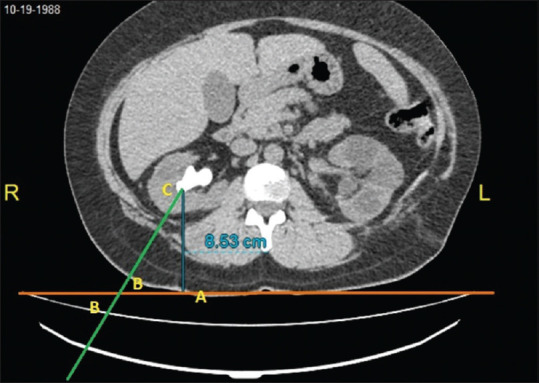
Patients and methods: The study was prospectively designed. After ethical committee approval, the study uses data from preoperative CT to construct a triangle so we can estimate puncture depth and angle. A triangle of three points, the first is point of entry to the pelvicalyceal system (PCS), the second is point on the skin perpendicular to it, and the third where the needle punctures the skin. The needle travel is estimated using the Pythagorean theorem and puncture angle using the inverse sine function. We evaluated 40 punctures in 36 PCNL procedures. After PCS puncture using fluoroscopy-guided triangulation, we measured the needle travel distance and angle to the horizontal plane. Then compared the results with mathematically estimated values.
Results: We targeted posterior lower calyx in 21 (70%) case. The correlation between measured and estimated needle travel distance with Rho coefficient of 0.76 with P < 0.001. The mean difference between the estimated and the measured needle travel was - 0.37 ± 1.2 cm (-2.6-1.6). Measured and estimated angle correlate with Rho coefficient of 0.77 and P < 0.001. The mean difference between the estimated and the measured angle was 2° ± 8° (-21°-16°).
Conclusion: Mathematical estimation of needle depth and angle for gaining access to the kidney correlates well with measured values.



 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


