Xu Li, Haoyang Yu, Haibo Feng, Songyuan Zhang, Yili Fu
{"title":"Design and Control for WLR-3P: A Hydraulic Wheel-Legged Robot.","authors":"Xu Li, Haoyang Yu, Haibo Feng, Songyuan Zhang, Yili Fu","doi":"10.34133/cbsystems.0025","DOIUrl":null,"url":null,"abstract":"<p><p>The robot used for disaster rescue or field exploration requires the ability of fast moving on flat road and adaptability on complex terrain. The hybrid wheel-legged robot (WLR-3P, prototype of the third-generation hydraulic wheel-legged robot) has the characteristics of fast and efficient mobility on flat surfaces and high environmental adaptability on rough terrains. In this paper, 3 design requirements are proposed to improve the mobility and environmental adaptability of the robot. To meet these 3 requirements, 2 design principles for each requirement are put forward. First, for light weight and low inertia with high stiffness, 3-dimensional printing technology and lightweight material are adopted. Second, the integrated hydraulically driven unit is used for high power density and fast response actuation. Third, the micro-hydraulic power unit achieves power autonomy, adopting the hoseless design to strengthen the reliability of the hydraulic system. What is more, the control system including hierarchical distributed electrical system and control strategy is presented. The mobility and adaptability of WLR-3P are demonstrated with a series of experiments. Finally, the robot can achieve a speed of 13.6 km/h and a jumping height of 0.2 m.</p>","PeriodicalId":72764,"journal":{"name":"Cyborg and bionic systems (Washington, D.C.)","volume":"4 ","pages":"0025"},"PeriodicalIF":18.1000,"publicationDate":"2023-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10250005/pdf/","citationCount":"1","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Cyborg and bionic systems (Washington, D.C.)","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.34133/cbsystems.0025","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
引用次数: 1
Abstract
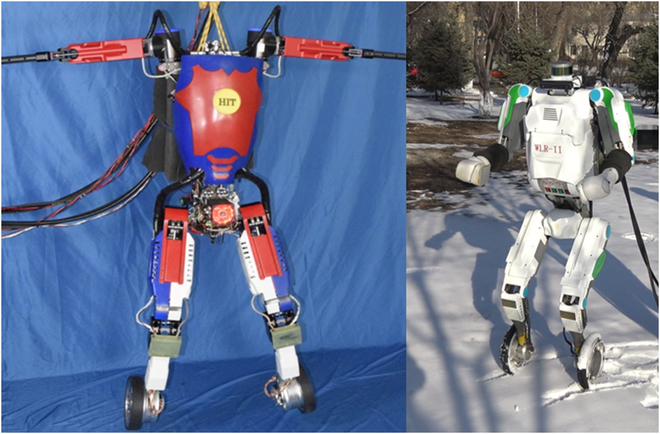
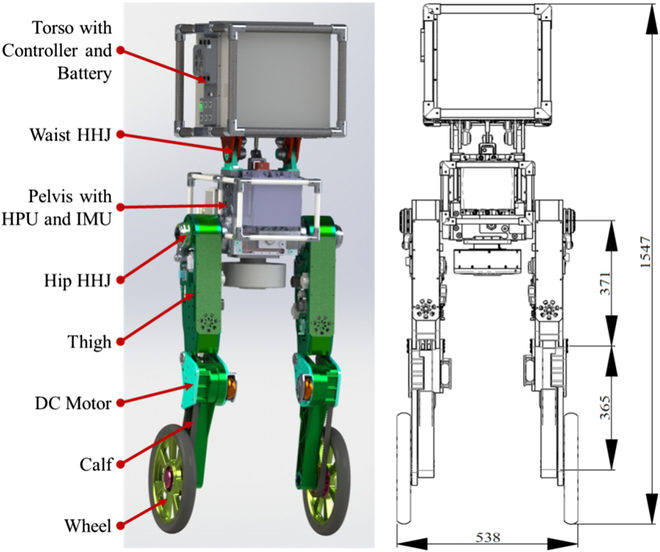
The robot used for disaster rescue or field exploration requires the ability of fast moving on flat road and adaptability on complex terrain. The hybrid wheel-legged robot (WLR-3P, prototype of the third-generation hydraulic wheel-legged robot) has the characteristics of fast and efficient mobility on flat surfaces and high environmental adaptability on rough terrains. In this paper, 3 design requirements are proposed to improve the mobility and environmental adaptability of the robot. To meet these 3 requirements, 2 design principles for each requirement are put forward. First, for light weight and low inertia with high stiffness, 3-dimensional printing technology and lightweight material are adopted. Second, the integrated hydraulically driven unit is used for high power density and fast response actuation. Third, the micro-hydraulic power unit achieves power autonomy, adopting the hoseless design to strengthen the reliability of the hydraulic system. What is more, the control system including hierarchical distributed electrical system and control strategy is presented. The mobility and adaptability of WLR-3P are demonstrated with a series of experiments. Finally, the robot can achieve a speed of 13.6 km/h and a jumping height of 0.2 m.


 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


