Daegeun Park, Christian Di Natali, Matteo Sposito, Darwin G Caldwell, Jesus Ortiz
{"title":"Elbow-sideWINDER (Elbow-side Wearable INDustrial Ergonomic Robot): design, control, and validation of a novel elbow exoskeleton.","authors":"Daegeun Park, Christian Di Natali, Matteo Sposito, Darwin G Caldwell, Jesus Ortiz","doi":"10.3389/fnbot.2023.1168213","DOIUrl":null,"url":null,"abstract":"<p><p>Musculoskeletal Disorders associated with the elbow are one of the most common forms of work-related injuries. Exoskeletons have been proposed as an approach to reduce and ideally eliminate these injuries; however, exoskeletons introduce their own problems, especially discomfort due to joint misalignment. The Elbow-sideWINDER with its associated control strategy is a novel elbow exoskeleton to assist elbow flexion/extension during occupational tasks. This study describes the exoskeleton showing how this can minimize discomfort caused by joint misalignment, maximize assistive performance, and provide increased robustness and reliability in real worksites. The proposed medium-level control strategy can provide effective assistive torque using three control units as follows: an arm kinematics estimator, a load estimator, and a friction compensator. The combined hardware/software system of the Elbow-sideWINDER is tested in load-lifting tasks (2 and 7 <i>kg</i>). This experiment focuses on the reduction in the activation level of the biceps brachii and triceps brachii in both arms and the change in the range of motion of the elbow during the task. It is shown that using the Elbow-sideWINDER, the biceps brachii, responsible for the elbow flexion, was significantly less activated (up to 38.8% at 2 <i>kg</i> and 25.7% at 7 <i>kg</i>, on average for both arms). For the triceps brachii, the muscle activation was reduced by up to 37.0% at 2 <i>kg</i> and 35.1% at 7 <i>kg</i>, on average for both arms. When wearing the exoskeleton, the range of motion of the elbow was reduced by up to 13.0° during the task, but it was within a safe range and could be compensated for by other joints such as the waist or knees. There are extremely encouraging results that provide good indicators and important clues for future improvement of the Elbow-sideWINDER and its control strategy.</p>","PeriodicalId":12628,"journal":{"name":"Frontiers in Neurorobotics","volume":"17 ","pages":"1168213"},"PeriodicalIF":2.6000,"publicationDate":"2023-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10369055/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Neurorobotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.3389/fnbot.2023.1168213","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
引用次数: 0
Abstract
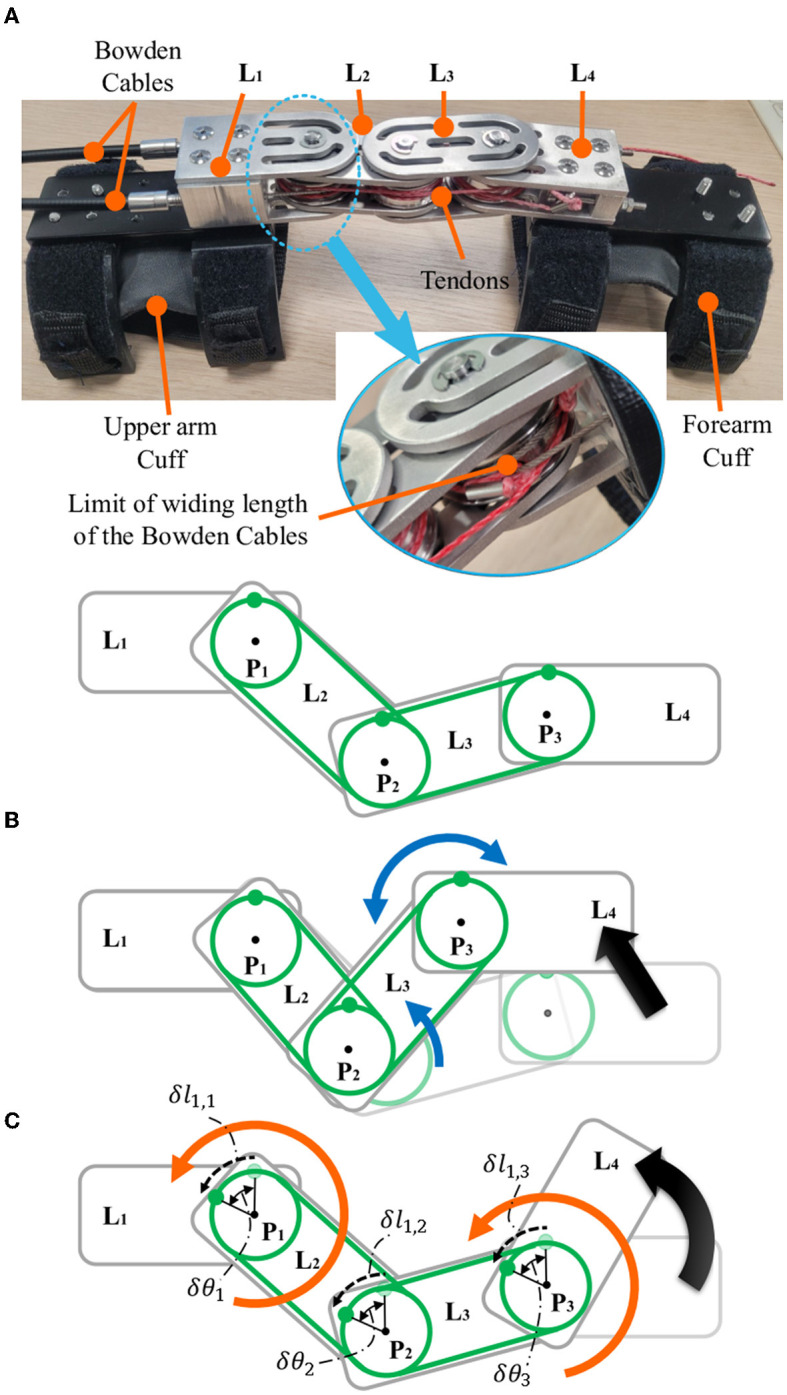
Musculoskeletal Disorders associated with the elbow are one of the most common forms of work-related injuries. Exoskeletons have been proposed as an approach to reduce and ideally eliminate these injuries; however, exoskeletons introduce their own problems, especially discomfort due to joint misalignment. The Elbow-sideWINDER with its associated control strategy is a novel elbow exoskeleton to assist elbow flexion/extension during occupational tasks. This study describes the exoskeleton showing how this can minimize discomfort caused by joint misalignment, maximize assistive performance, and provide increased robustness and reliability in real worksites. The proposed medium-level control strategy can provide effective assistive torque using three control units as follows: an arm kinematics estimator, a load estimator, and a friction compensator. The combined hardware/software system of the Elbow-sideWINDER is tested in load-lifting tasks (2 and 7 kg). This experiment focuses on the reduction in the activation level of the biceps brachii and triceps brachii in both arms and the change in the range of motion of the elbow during the task. It is shown that using the Elbow-sideWINDER, the biceps brachii, responsible for the elbow flexion, was significantly less activated (up to 38.8% at 2 kg and 25.7% at 7 kg, on average for both arms). For the triceps brachii, the muscle activation was reduced by up to 37.0% at 2 kg and 35.1% at 7 kg, on average for both arms. When wearing the exoskeleton, the range of motion of the elbow was reduced by up to 13.0° during the task, but it was within a safe range and could be compensated for by other joints such as the waist or knees. There are extremely encouraging results that provide good indicators and important clues for future improvement of the Elbow-sideWINDER and its control strategy.
期刊介绍:
Frontiers in Neurorobotics publishes rigorously peer-reviewed research in the science and technology of embodied autonomous neural systems. Specialty Chief Editors Alois C. Knoll and Florian Röhrbein at the Technische Universität München are supported by an outstanding Editorial Board of international experts. This multidisciplinary open-access journal is at the forefront of disseminating and communicating scientific knowledge and impactful discoveries to researchers, academics and the public worldwide.
Neural systems include brain-inspired algorithms (e.g. connectionist networks), computational models of biological neural networks (e.g. artificial spiking neural nets, large-scale simulations of neural microcircuits) and actual biological systems (e.g. in vivo and in vitro neural nets). The focus of the journal is the embodiment of such neural systems in artificial software and hardware devices, machines, robots or any other form of physical actuation. This also includes prosthetic devices, brain machine interfaces, wearable systems, micro-machines, furniture, home appliances, as well as systems for managing micro and macro infrastructures. Frontiers in Neurorobotics also aims to publish radically new tools and methods to study plasticity and development of autonomous self-learning systems that are capable of acquiring knowledge in an open-ended manner. Models complemented with experimental studies revealing self-organizing principles of embodied neural systems are welcome. Our journal also publishes on the micro and macro engineering and mechatronics of robotic devices driven by neural systems, as well as studies on the impact that such systems will have on our daily life.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


