{"title":"YOLOv7-CSAW for maritime target detection.","authors":"Qiang Zhu, Ke Ma, Zhong Wang, Peibei Shi","doi":"10.3389/fnbot.2023.1210470","DOIUrl":null,"url":null,"abstract":"<p><strong>Introduction: </strong>The issue of low detection rates and high false negative rates in maritime search and rescue operations has been a critical problem in current target detection algorithms. This is mainly due to the complex maritime environment and the small size of most targets. These challenges affect the algorithms' robustness and generalization.</p><p><strong>Methods: </strong>We proposed YOLOv7-CSAW, an improved maritime search and rescue target detection algorithm based on YOLOv7. We used the K-means++ algorithm for the optimal size determination of prior anchor boxes, ensuring an accurate match with actual objects. The C2f module was incorporated for a lightweight model capable of obtaining richer gradient flow information. The model's perception of small target features was increased with the non-parameter simple attention module (SimAM). We further upgraded the feature fusion network to an adaptive feature fusion network (ASFF) to address the lack of high-level semantic features in small targets. Lastly, we implemented the wise intersection over union (WIoU) loss function to tackle large positioning errors and missed detections.</p><p><strong>Results: </strong>Our algorithm was extensively tested on a maritime search and rescue dataset with YOLOv7 as the baseline model. We observed a significant improvement in the detection performance compared to traditional deep learning algorithms, with a mean average precision (mAP) improvement of 10.73% over the baseline model.</p><p><strong>Discussion: </strong>YOLOv7-CSAW significantly enhances the accuracy and robustness of small target detection in complex scenes. This algorithm effectively addresses the common issues experienced in maritime search and rescue operations, specifically improving the detection rates and reducing false negatives, proving to be a superior alternative to current target detection algorithms.</p>","PeriodicalId":12628,"journal":{"name":"Frontiers in Neurorobotics","volume":"17 ","pages":"1210470"},"PeriodicalIF":2.6000,"publicationDate":"2023-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10352484/pdf/","citationCount":"2","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Neurorobotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.3389/fnbot.2023.1210470","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
引用次数: 2
Abstract
Introduction: The issue of low detection rates and high false negative rates in maritime search and rescue operations has been a critical problem in current target detection algorithms. This is mainly due to the complex maritime environment and the small size of most targets. These challenges affect the algorithms' robustness and generalization.
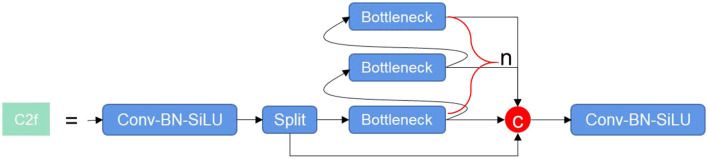
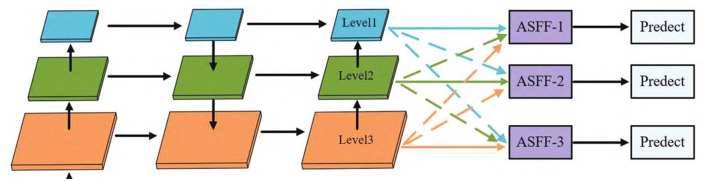
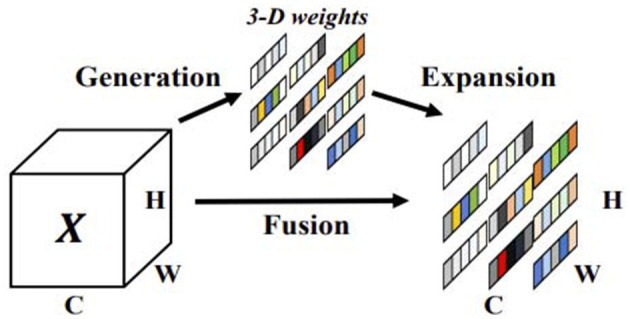
Methods: We proposed YOLOv7-CSAW, an improved maritime search and rescue target detection algorithm based on YOLOv7. We used the K-means++ algorithm for the optimal size determination of prior anchor boxes, ensuring an accurate match with actual objects. The C2f module was incorporated for a lightweight model capable of obtaining richer gradient flow information. The model's perception of small target features was increased with the non-parameter simple attention module (SimAM). We further upgraded the feature fusion network to an adaptive feature fusion network (ASFF) to address the lack of high-level semantic features in small targets. Lastly, we implemented the wise intersection over union (WIoU) loss function to tackle large positioning errors and missed detections.
Results: Our algorithm was extensively tested on a maritime search and rescue dataset with YOLOv7 as the baseline model. We observed a significant improvement in the detection performance compared to traditional deep learning algorithms, with a mean average precision (mAP) improvement of 10.73% over the baseline model.
Discussion: YOLOv7-CSAW significantly enhances the accuracy and robustness of small target detection in complex scenes. This algorithm effectively addresses the common issues experienced in maritime search and rescue operations, specifically improving the detection rates and reducing false negatives, proving to be a superior alternative to current target detection algorithms.
期刊介绍:
Frontiers in Neurorobotics publishes rigorously peer-reviewed research in the science and technology of embodied autonomous neural systems. Specialty Chief Editors Alois C. Knoll and Florian Röhrbein at the Technische Universität München are supported by an outstanding Editorial Board of international experts. This multidisciplinary open-access journal is at the forefront of disseminating and communicating scientific knowledge and impactful discoveries to researchers, academics and the public worldwide.
Neural systems include brain-inspired algorithms (e.g. connectionist networks), computational models of biological neural networks (e.g. artificial spiking neural nets, large-scale simulations of neural microcircuits) and actual biological systems (e.g. in vivo and in vitro neural nets). The focus of the journal is the embodiment of such neural systems in artificial software and hardware devices, machines, robots or any other form of physical actuation. This also includes prosthetic devices, brain machine interfaces, wearable systems, micro-machines, furniture, home appliances, as well as systems for managing micro and macro infrastructures. Frontiers in Neurorobotics also aims to publish radically new tools and methods to study plasticity and development of autonomous self-learning systems that are capable of acquiring knowledge in an open-ended manner. Models complemented with experimental studies revealing self-organizing principles of embodied neural systems are welcome. Our journal also publishes on the micro and macro engineering and mechatronics of robotic devices driven by neural systems, as well as studies on the impact that such systems will have on our daily life.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


