An Iterative Learning Controller for a Switched Cooperative Allocation Strategy During Sit-to-Stand Tasks with a Hybrid Exoskeleton
IF 4.9
2区 计算机科学
Q1 AUTOMATION & CONTROL SYSTEMS
引用次数: 15
Abstract
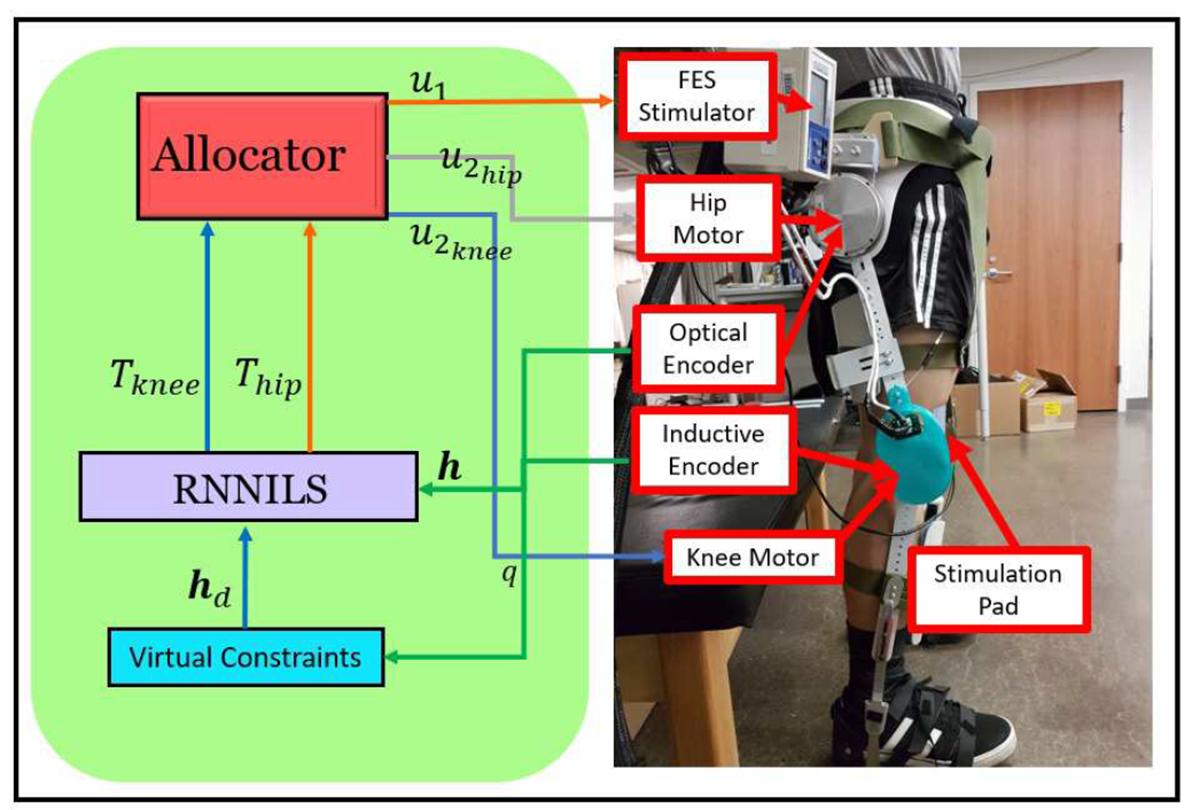
A hybrid exoskeleton that combines functional electrical stimulation (FES) and a powered exoskeleton is an emerging technology for assisting people with mobility disorders. The cooperative use of FES and the exoskeleton allows active muscle contractions through FES while robustifying torque generation to reduce FES-induced muscle fatigue. In this article, a switched distribution of allocation ratios between FES and electric motors in a closed-loop adaptive control design is explored for the first time. The new controller uses an iterative learning neural network (NN)-based control law to compensate for structured and unstructured parametric uncertainties in the hybrid exoskeleton model. A discrete Lyapunov-like stability analysis that uses a common energy function proves asymptotic stability for the switched system with iterative learning update laws. Five human participants, including a person with complete spinal cord injury, performed sit-to-stand tasks with the new controller. The experimental results showed that the synthesized controller, in a few iterations, reduced the root mean square error between desired positions and actual positions of the knee and hip joints by 46.20% and 53.34%, respectively. The sit-to-stand experimental results also show that the proposed NN-based iterative learning control (NNILC) approach can recover the asymptotically trajectory tracking performance despite the switching of allocation levels between FES and electric motor. Compared to a proportional-derivative controller and traditional iterative learning control, the findings showed that the new controller can potentially simplify the clinical implementation of the hybrid exoskeleton with minimal parameters tuning.


混合外骨骼坐立任务切换协同分配策略的迭代学习控制器
结合功能性电刺激(FES)和动力外骨骼的混合外骨骼是一种帮助行动障碍患者的新兴技术。FES和外骨骼的协同使用允许通过FES进行主动肌肉收缩,同时增强扭矩产生,以减少FES引起的肌肉疲劳。本文首次探讨了闭环自适应控制设计中FES与电动机分配比的切换分布。该控制器采用基于迭代学习神经网络(NN)的控制律来补偿混合外骨骼模型中的结构化和非结构化参数的不确定性。一个使用公共能量函数的离散类李雅普诺夫稳定性分析证明了具有迭代学习更新律的切换系统的渐近稳定性。五名参与者,包括一名完全脊髓损伤的人,用新的控制器完成了坐到站的任务。实验结果表明,经过几次迭代,合成控制器将膝关节和髋关节期望位置与实际位置的均方根误差分别降低了46.20%和53.34%。静坐-站立实验结果还表明,尽管FES和电动机之间的分配水平切换,基于神经网络的迭代学习控制(NNILC)方法仍能恢复渐近轨迹跟踪性能。与比例导数控制器和传统的迭代学习控制相比,研究结果表明,新的控制器可以以最小的参数调整简化混合外骨骼的临床实现。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

IEEE Transactions on Control Systems Technology
工程技术-工程:电子与电气
CiteScore
10.70
自引率
2.10%
发文量
218
审稿时长
6.7 months
期刊介绍:
The IEEE Transactions on Control Systems Technology publishes high quality technical papers on technological advances in control engineering. The word technology is from the Greek technologia. The modern meaning is a scientific method to achieve a practical purpose. Control Systems Technology includes all aspects of control engineering needed to implement practical control systems, from analysis and design, through simulation and hardware. A primary purpose of the IEEE Transactions on Control Systems Technology is to have an archival publication which will bridge the gap between theory and practice. Papers are published in the IEEE Transactions on Control System Technology which disclose significant new knowledge, exploratory developments, or practical applications in all aspects of technology needed to implement control systems, from analysis and design through simulation, and hardware.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


