{"title":"Generating Clear Vibrotactile Cues with a Magnet Embedded in a Soft Finger Sheath.","authors":"Ifat Gertler, Gokhan Serhat, Katherine J Kuchenbecker","doi":"10.1089/soro.2021.0184","DOIUrl":null,"url":null,"abstract":"<p><p>Haptic displays act on the user's body to stimulate the sense of touch and enrich applications from gaming and computer-aided design to rehabilitation and remote surgery. However, when crafted from typical rigid robotic components, they tend to be heavy, bulky, and expensive, while sleeker designs often struggle to create clear haptic cues. This article introduces a lightweight wearable silicone finger sheath that can deliver salient and rich vibrotactile cues using electromagnetic actuation. We fabricate the sheath on a ferromagnetic mandrel with a process based on dip molding, a robust fabrication method that is rarely used in soft robotics but is suitable for commercial production. A miniature rare-earth magnet embedded within the silicone layers at the center of the finger pad is driven to vibrate by the application of alternating current to a nearby air-coil. Experiments are conducted to determine the amplitude of the magnetic force and the frequency response function for the displacement amplitude of the magnet perpendicular to the skin. In addition, high-fidelity finite element analyses of the finger wearing the device are performed to investigate the trends observed in the measurements. The experimental and simulated results show consistent dynamic behavior from 10 to 1000 Hz, with the displacement decreasing after about 300 Hz. These results match the detection threshold profile obtained in a psychophysical study performed by 17 users, where more current was needed only at the highest frequency. A cue identification experiment and a demonstration in virtual reality validate the feasibility of this approach to fingertip haptics.</p>","PeriodicalId":48685,"journal":{"name":"Soft Robotics","volume":"10 3","pages":"624-635"},"PeriodicalIF":6.1000,"publicationDate":"2023-06-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://ftp.ncbi.nlm.nih.gov/pub/pmc/oa_pdf/1c/4f/soro.2021.0184.PMC10278030.pdf","citationCount":"1","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Soft Robotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1089/soro.2021.0184","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ROBOTICS","Score":null,"Total":0}
引用次数: 1
Abstract
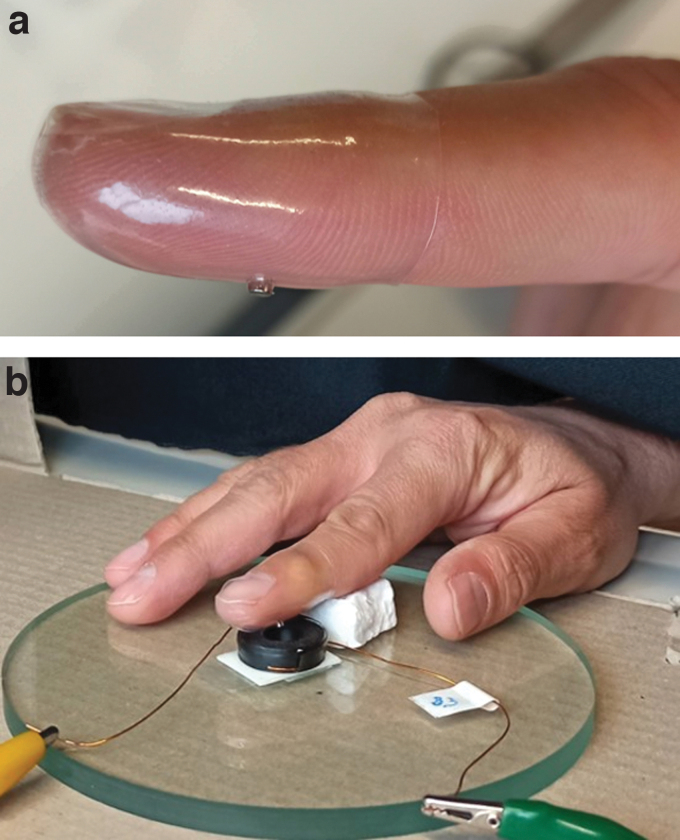
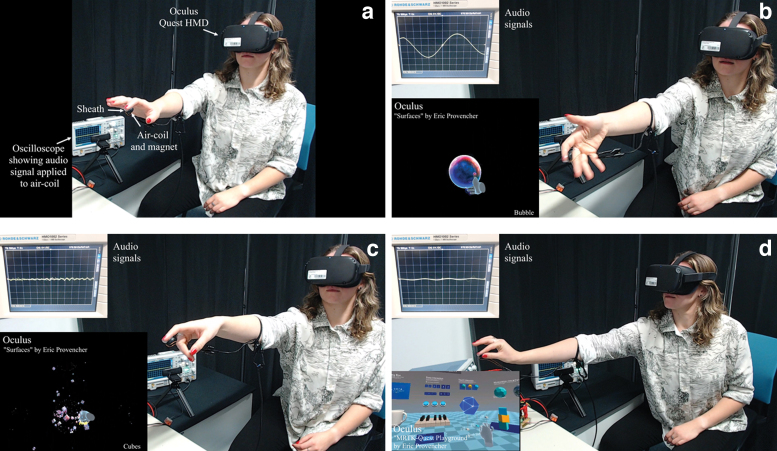
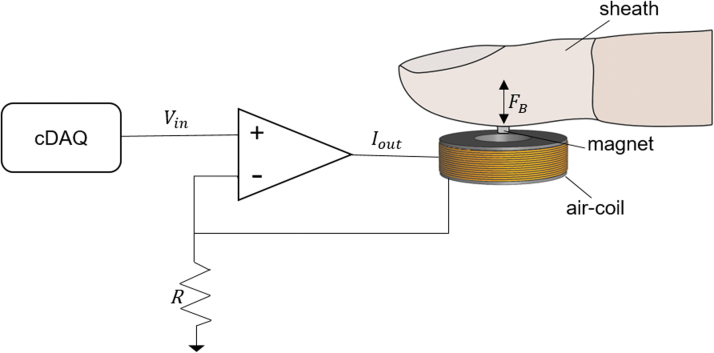
Haptic displays act on the user's body to stimulate the sense of touch and enrich applications from gaming and computer-aided design to rehabilitation and remote surgery. However, when crafted from typical rigid robotic components, they tend to be heavy, bulky, and expensive, while sleeker designs often struggle to create clear haptic cues. This article introduces a lightweight wearable silicone finger sheath that can deliver salient and rich vibrotactile cues using electromagnetic actuation. We fabricate the sheath on a ferromagnetic mandrel with a process based on dip molding, a robust fabrication method that is rarely used in soft robotics but is suitable for commercial production. A miniature rare-earth magnet embedded within the silicone layers at the center of the finger pad is driven to vibrate by the application of alternating current to a nearby air-coil. Experiments are conducted to determine the amplitude of the magnetic force and the frequency response function for the displacement amplitude of the magnet perpendicular to the skin. In addition, high-fidelity finite element analyses of the finger wearing the device are performed to investigate the trends observed in the measurements. The experimental and simulated results show consistent dynamic behavior from 10 to 1000 Hz, with the displacement decreasing after about 300 Hz. These results match the detection threshold profile obtained in a psychophysical study performed by 17 users, where more current was needed only at the highest frequency. A cue identification experiment and a demonstration in virtual reality validate the feasibility of this approach to fingertip haptics.
期刊介绍:
Soft Robotics (SoRo) stands as a premier robotics journal, showcasing top-tier, peer-reviewed research on the forefront of soft and deformable robotics. Encompassing flexible electronics, materials science, computer science, and biomechanics, it pioneers breakthroughs in robotic technology capable of safe interaction with living systems and navigating complex environments, natural or human-made.
With a multidisciplinary approach, SoRo integrates advancements in biomedical engineering, biomechanics, mathematical modeling, biopolymer chemistry, computer science, and tissue engineering, offering comprehensive insights into constructing adaptable devices that can undergo significant changes in shape and size. This transformative technology finds critical applications in surgery, assistive healthcare devices, emergency search and rescue, space instrument repair, mine detection, and beyond.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


