Bingcheng Wang, Zhouyi Wang, Yifan Song, Weijia Zong, Linghao Zhang, Keju Ji, Poramate Manoonpong, Zhendong Dai
{"title":"A Neural Coordination Strategy for Attachment and Detachment of a Climbing Robot Inspired by Gecko Locomotion.","authors":"Bingcheng Wang, Zhouyi Wang, Yifan Song, Weijia Zong, Linghao Zhang, Keju Ji, Poramate Manoonpong, Zhendong Dai","doi":"10.34133/cbsystems.0008","DOIUrl":null,"url":null,"abstract":"<p><p>Climbing behavior is a superior motion skill that animals have evolved to obtain a more beneficial position in complex natural environments. Compared to animals, current bionic climbing robots are less agile, stable, and energy-efficient. Further, they locomote at a low speed and have poor adaptation to the substrate. One of the key elements that can improve their locomotion efficiency is the active and flexible feet or toes observed in climbing animals. Inspired by the active attachment-detachment behavior of geckos, a hybrid pneumatic-electric-driven climbing robot with active attachment-detachment bionic flexible feet (toes) was developed. Although the introduction of bionic flexible toes can effectively improve the robot's adaptability to the environment, it also poses control challenges, specifically, the realization of attachment-detachment behavior by the mechanics of the feet, the realization of hybrid drive control with different response characteristics, and the interlimb collaboration and limb-foot coordination with a hysteresis effect. Through the analysis of geckos' limbs and foot kinematic behavior during climbing, rhythmic attachment-detachment strategies and coordination behavior between toes and limbs at different inclines were identified. To enable the robot to achieve similar foot attachment-detachment behavior for climbing ability enhancement, we propose a modular neural control framework comprising a central pattern generator module, a post-processing central pattern generation module, a hysteresis delay line module, and an actuator signal conditioning module. Among them, the hysteresis adaptation module helps the bionic flexible toes to achieve variable phase relationships with the motorized joint, thus enabling proper limb-to-foot coordination and interlimb collaboration. The experiments demonstrated that the robot with neural control achieved proper coordination, resulting in a foot with a 285% larger adhesion area than that of a conventional algorithm. In addition, in the plane/arc climbing scenario, the robot with coordination behavior increased by as much as 150%, compared to the incoordinated one owing to its higher adhesion reliability.</p>","PeriodicalId":72764,"journal":{"name":"Cyborg and bionic systems (Washington, D.C.)","volume":"4 ","pages":"0008"},"PeriodicalIF":10.5000,"publicationDate":"2023-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10076062/pdf/","citationCount":"2","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Cyborg and bionic systems (Washington, D.C.)","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.34133/cbsystems.0008","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
引用次数: 2
Abstract
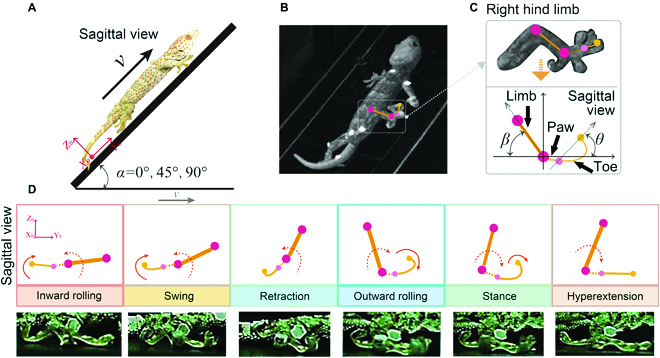
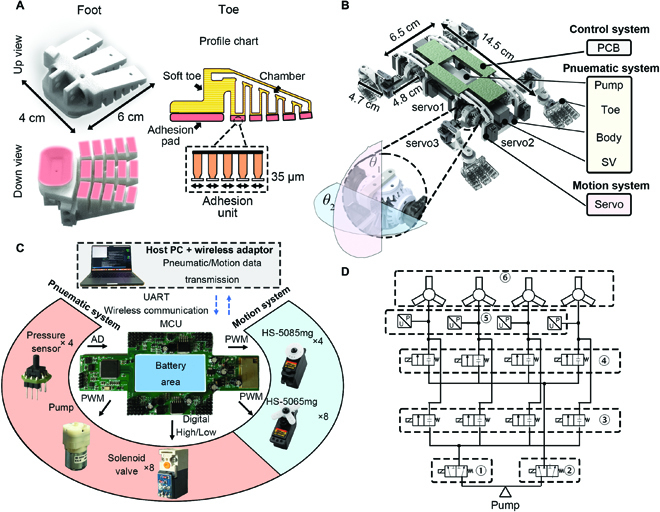
Climbing behavior is a superior motion skill that animals have evolved to obtain a more beneficial position in complex natural environments. Compared to animals, current bionic climbing robots are less agile, stable, and energy-efficient. Further, they locomote at a low speed and have poor adaptation to the substrate. One of the key elements that can improve their locomotion efficiency is the active and flexible feet or toes observed in climbing animals. Inspired by the active attachment-detachment behavior of geckos, a hybrid pneumatic-electric-driven climbing robot with active attachment-detachment bionic flexible feet (toes) was developed. Although the introduction of bionic flexible toes can effectively improve the robot's adaptability to the environment, it also poses control challenges, specifically, the realization of attachment-detachment behavior by the mechanics of the feet, the realization of hybrid drive control with different response characteristics, and the interlimb collaboration and limb-foot coordination with a hysteresis effect. Through the analysis of geckos' limbs and foot kinematic behavior during climbing, rhythmic attachment-detachment strategies and coordination behavior between toes and limbs at different inclines were identified. To enable the robot to achieve similar foot attachment-detachment behavior for climbing ability enhancement, we propose a modular neural control framework comprising a central pattern generator module, a post-processing central pattern generation module, a hysteresis delay line module, and an actuator signal conditioning module. Among them, the hysteresis adaptation module helps the bionic flexible toes to achieve variable phase relationships with the motorized joint, thus enabling proper limb-to-foot coordination and interlimb collaboration. The experiments demonstrated that the robot with neural control achieved proper coordination, resulting in a foot with a 285% larger adhesion area than that of a conventional algorithm. In addition, in the plane/arc climbing scenario, the robot with coordination behavior increased by as much as 150%, compared to the incoordinated one owing to its higher adhesion reliability.


 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


