Yibin Wang, Hui Chen, Junhui Law, Xingzhou Du, Jiangfan Yu
{"title":"Ultrafast Miniature Robotic Swimmers with Upstream Motility.","authors":"Yibin Wang, Hui Chen, Junhui Law, Xingzhou Du, Jiangfan Yu","doi":"10.34133/cbsystems.0015","DOIUrl":null,"url":null,"abstract":"<p><p>With the development of materials science and micro-nano fabrication techniques, miniature soft robots at millimeter or submillimeter size can be manufactured and actuated remotely. The small-scaled robots have the unique capability to access hard-to-reach regions in the human body in a noninvasive manner. To date, it is still challenging for miniature robots to accurately move in the diverse and dynamic environments in the human body (e.g., in blood flow). To effectively locomote in the vascular system, miniature swimmers with upstream swimming capability are required. Herein, we design and fabricate a miniature robotic swimmer capable of performing ultrafast swimming in a fluidic environment. The maximum velocity of the swimmer in water is 30 cm/s, which is 60 body lengths. Moreover, in a tubular environment, the swimmer can still obtain a swimming velocity of 17 cm/s. The swimmer can also perform upstream swimming in a tubular environment with a velocity of 5 cm/s when the flow speed is 10 cm/s. The ultrasound-guided navigation of the swimmer in a phantom mimicking a blood vessel is also realized. This work gives insight into the design of agile undulatory milliswimmers for future biomedical applications.</p>","PeriodicalId":72764,"journal":{"name":"Cyborg and bionic systems (Washington, D.C.)","volume":"4 ","pages":"0015"},"PeriodicalIF":10.5000,"publicationDate":"2023-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10019906/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Cyborg and bionic systems (Washington, D.C.)","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.34133/cbsystems.0015","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2023/3/15 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
引用次数: 0
Abstract
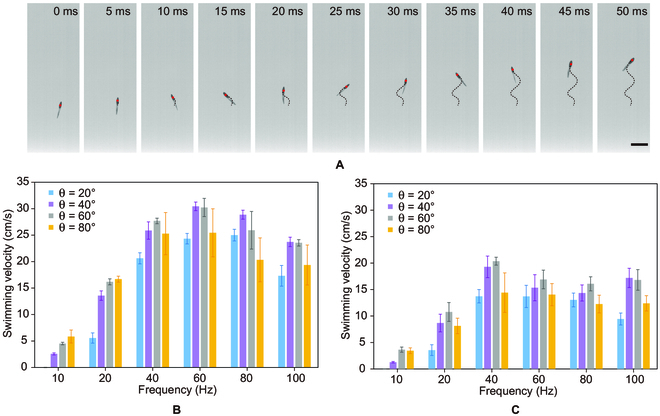
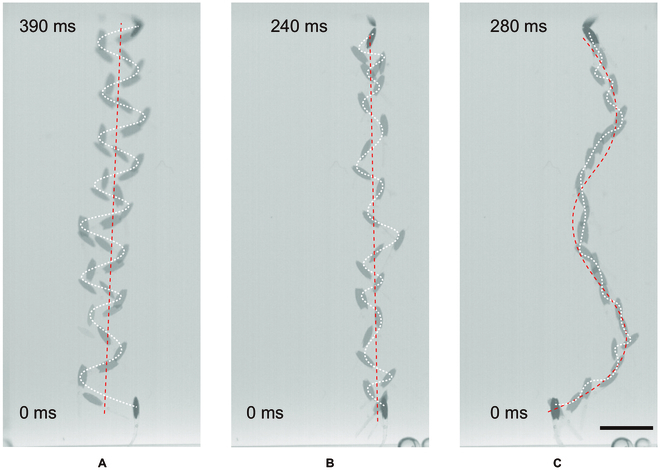
With the development of materials science and micro-nano fabrication techniques, miniature soft robots at millimeter or submillimeter size can be manufactured and actuated remotely. The small-scaled robots have the unique capability to access hard-to-reach regions in the human body in a noninvasive manner. To date, it is still challenging for miniature robots to accurately move in the diverse and dynamic environments in the human body (e.g., in blood flow). To effectively locomote in the vascular system, miniature swimmers with upstream swimming capability are required. Herein, we design and fabricate a miniature robotic swimmer capable of performing ultrafast swimming in a fluidic environment. The maximum velocity of the swimmer in water is 30 cm/s, which is 60 body lengths. Moreover, in a tubular environment, the swimmer can still obtain a swimming velocity of 17 cm/s. The swimmer can also perform upstream swimming in a tubular environment with a velocity of 5 cm/s when the flow speed is 10 cm/s. The ultrasound-guided navigation of the swimmer in a phantom mimicking a blood vessel is also realized. This work gives insight into the design of agile undulatory milliswimmers for future biomedical applications.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


