Wangdo Kim, Emir A Vela, Sean S Kohles, Victor Huayamave, Oscar Gonzalez
{"title":"Validation of a Biomechanical Injury and Disease Assessment Platform Applying an Inertial-Based Biosensor and Axis Vector Computation.","authors":"Wangdo Kim, Emir A Vela, Sean S Kohles, Victor Huayamave, Oscar Gonzalez","doi":"10.3390/electronics12173694","DOIUrl":null,"url":null,"abstract":"<p><p>Inertial kinetics and kinematics have substantial influences on human biomechanical function. A new algorithm for Inertial Measurement Unit (IMU)-based motion tracking is presented in this work. The primary aims of this paper are to combine recent developments in improved biosensor technology with mainstream motion-tracking hardware to measure the overall performance of human movement based on joint axis-angle representations of limb rotation. This work describes an alternative approach to representing three-dimensional rotations using a normalized vector around which an identified joint angle defines the overall rotation, rather than a traditional Euler angle approach. Furthermore, IMUs allow for the direct measurement of joint angular velocities, offering the opportunity to increase the accuracy of instantaneous axis of rotation estimations. Although the axis-angle representation requires vector quotient algebra (quaternions) to define rotation, this approach may be preferred for many graphics, vision, and virtual reality software applications. The analytical method was validated with laboratory data gathered from an infant dummy leg's flexion and extension knee movements and applied to a living subject's upper limb movement. The results showed that the novel approach could reasonably handle a simple case and provide a detailed analysis of axis-angle migration. The described algorithm could play a notable role in the biomechanical analysis of human joints and offers a harbinger of IMU-based biosensors that may detect pathological patterns of joint disease and injury.</p>","PeriodicalId":46448,"journal":{"name":"JOURNAL OF THE HISTORY OF PHILOSOPHY","volume":"14 1","pages":""},"PeriodicalIF":0.6000,"publicationDate":"2023-09-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10653259/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"JOURNAL OF THE HISTORY OF PHILOSOPHY","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.3390/electronics12173694","RegionNum":1,"RegionCategory":"哲学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2023/8/31 0:00:00","PubModel":"Epub","JCR":"0","JCRName":"PHILOSOPHY","Score":null,"Total":0}
引用次数: 0
Abstract
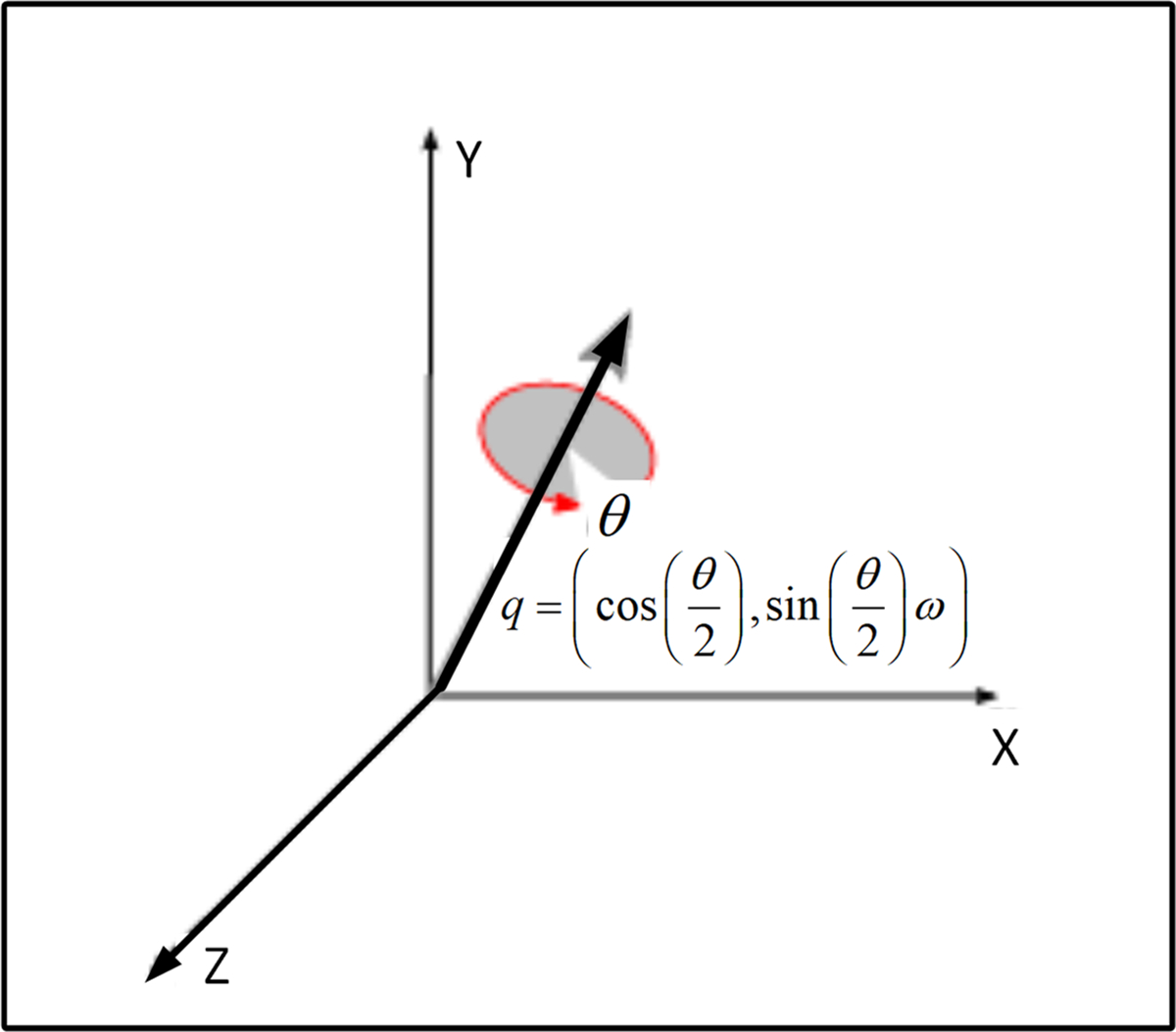
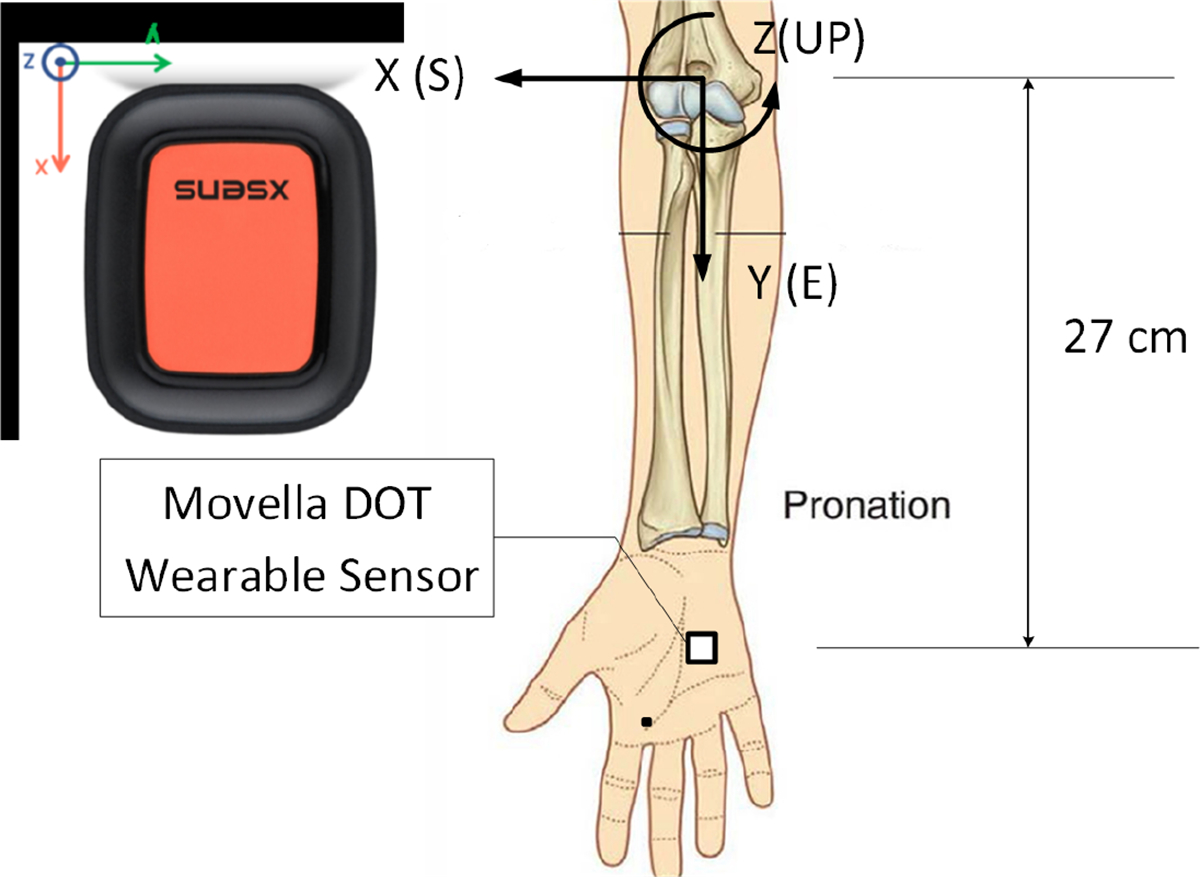
Inertial kinetics and kinematics have substantial influences on human biomechanical function. A new algorithm for Inertial Measurement Unit (IMU)-based motion tracking is presented in this work. The primary aims of this paper are to combine recent developments in improved biosensor technology with mainstream motion-tracking hardware to measure the overall performance of human movement based on joint axis-angle representations of limb rotation. This work describes an alternative approach to representing three-dimensional rotations using a normalized vector around which an identified joint angle defines the overall rotation, rather than a traditional Euler angle approach. Furthermore, IMUs allow for the direct measurement of joint angular velocities, offering the opportunity to increase the accuracy of instantaneous axis of rotation estimations. Although the axis-angle representation requires vector quotient algebra (quaternions) to define rotation, this approach may be preferred for many graphics, vision, and virtual reality software applications. The analytical method was validated with laboratory data gathered from an infant dummy leg's flexion and extension knee movements and applied to a living subject's upper limb movement. The results showed that the novel approach could reasonably handle a simple case and provide a detailed analysis of axis-angle migration. The described algorithm could play a notable role in the biomechanical analysis of human joints and offers a harbinger of IMU-based biosensors that may detect pathological patterns of joint disease and injury.
期刊介绍:
Since January 2002, the Journal of the History of Philosophy has been published by The Johns Hopkins University Press. For subscriptions, change of address, and back issues, please contact Subscription Services. In addition to photocopying allowed by the "fair use" doctrine, JHP authorizes personal or educational multiple-copying by instructors for use within a course. This policy does not cover photocopying for commercial use either by individuals or publishers. All such uses must be authorized by JHP.


 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


