{"title":"Multimodal intelligent logistics robot combining 3D CNN, LSTM, and visual SLAM for path planning and control.","authors":"Zhuqin Han","doi":"10.3389/fnbot.2023.1285673","DOIUrl":null,"url":null,"abstract":"<p><strong>Introduction: </strong>In today's dynamic logistics landscape, the role of intelligent robots is paramount for enhancing efficiency, reducing costs, and ensuring safety. Traditional path planning methods often struggle to adapt to changing environments, resulting in issues like collisions and conflicts. This research addresses the challenge of path planning and control for logistics robots operating in complex environments. The proposed method aims to integrate information from various perception sources to enhance path planning and obstacle avoidance, thereby increasing the autonomy and reliability of logistics robots.</p><p><strong>Methods: </strong>The method presented in this paper begins by employing a 3D Convolutional Neural Network (CNN) to learn feature representations of objects within the environment, enabling object recognition. Subsequently, Long Short-Term Memory (LSTM) models are utilized to capture spatio-temporal features and predict the behavior and trajectories of dynamic obstacles. This predictive capability empowers robots to more accurately anticipate the future positions of obstacles in intricate settings, thereby mitigating potential collision risks. Finally, the Dijkstra algorithm is employed for path planning and control decisions to ensure the selection of optimal paths across diverse scenarios.</p><p><strong>Results: </strong>In a series of rigorous experiments, the proposed method outperforms traditional approaches in terms of both path planning accuracy and obstacle avoidance performance. These substantial improvements underscore the efficacy of the intelligent path planning and control scheme.</p><p><strong>Discussion: </strong>This research contributes to enhancing the practicality of logistics robots in complex environments, thereby fostering increased efficiency and safety within the logistics industry. By combining object recognition, spatio-temporal modeling, and optimized path planning, the proposed method enables logistics robots to navigate intricate scenarios with higher precision and reliability, ultimately advancing the capabilities of autonomous logistics operations.</p>","PeriodicalId":12628,"journal":{"name":"Frontiers in Neurorobotics","volume":"17 ","pages":"1285673"},"PeriodicalIF":2.6000,"publicationDate":"2023-10-16","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10613672/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Neurorobotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.3389/fnbot.2023.1285673","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2023/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
引用次数: 0
Abstract
Introduction: In today's dynamic logistics landscape, the role of intelligent robots is paramount for enhancing efficiency, reducing costs, and ensuring safety. Traditional path planning methods often struggle to adapt to changing environments, resulting in issues like collisions and conflicts. This research addresses the challenge of path planning and control for logistics robots operating in complex environments. The proposed method aims to integrate information from various perception sources to enhance path planning and obstacle avoidance, thereby increasing the autonomy and reliability of logistics robots.
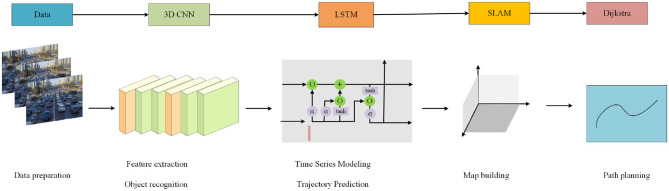
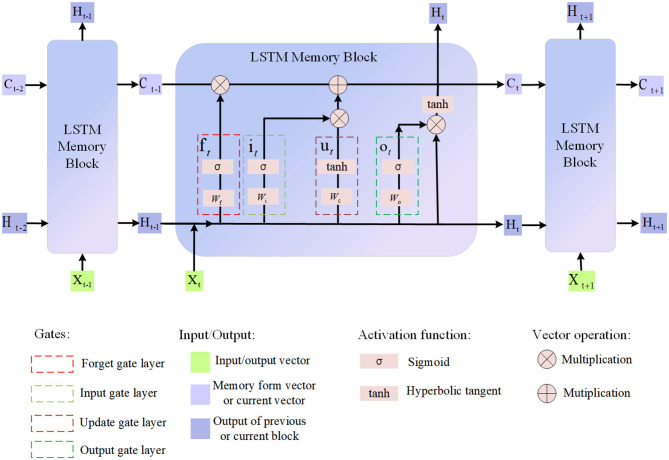
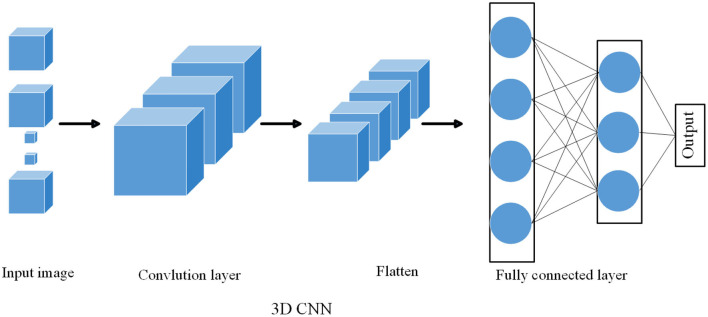
Methods: The method presented in this paper begins by employing a 3D Convolutional Neural Network (CNN) to learn feature representations of objects within the environment, enabling object recognition. Subsequently, Long Short-Term Memory (LSTM) models are utilized to capture spatio-temporal features and predict the behavior and trajectories of dynamic obstacles. This predictive capability empowers robots to more accurately anticipate the future positions of obstacles in intricate settings, thereby mitigating potential collision risks. Finally, the Dijkstra algorithm is employed for path planning and control decisions to ensure the selection of optimal paths across diverse scenarios.
Results: In a series of rigorous experiments, the proposed method outperforms traditional approaches in terms of both path planning accuracy and obstacle avoidance performance. These substantial improvements underscore the efficacy of the intelligent path planning and control scheme.
Discussion: This research contributes to enhancing the practicality of logistics robots in complex environments, thereby fostering increased efficiency and safety within the logistics industry. By combining object recognition, spatio-temporal modeling, and optimized path planning, the proposed method enables logistics robots to navigate intricate scenarios with higher precision and reliability, ultimately advancing the capabilities of autonomous logistics operations.
期刊介绍:
Frontiers in Neurorobotics publishes rigorously peer-reviewed research in the science and technology of embodied autonomous neural systems. Specialty Chief Editors Alois C. Knoll and Florian Röhrbein at the Technische Universität München are supported by an outstanding Editorial Board of international experts. This multidisciplinary open-access journal is at the forefront of disseminating and communicating scientific knowledge and impactful discoveries to researchers, academics and the public worldwide.
Neural systems include brain-inspired algorithms (e.g. connectionist networks), computational models of biological neural networks (e.g. artificial spiking neural nets, large-scale simulations of neural microcircuits) and actual biological systems (e.g. in vivo and in vitro neural nets). The focus of the journal is the embodiment of such neural systems in artificial software and hardware devices, machines, robots or any other form of physical actuation. This also includes prosthetic devices, brain machine interfaces, wearable systems, micro-machines, furniture, home appliances, as well as systems for managing micro and macro infrastructures. Frontiers in Neurorobotics also aims to publish radically new tools and methods to study plasticity and development of autonomous self-learning systems that are capable of acquiring knowledge in an open-ended manner. Models complemented with experimental studies revealing self-organizing principles of embodied neural systems are welcome. Our journal also publishes on the micro and macro engineering and mechatronics of robotic devices driven by neural systems, as well as studies on the impact that such systems will have on our daily life.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


