Novel pedestrian navigation system based on zero velocity update procedure technology and improved Sage-Husa adaptive Kalman filter with index fading memory factor
Lei Huang, Yuting Shi, Jianhua Wang, Xiaoqian Zhang, Daming Xu, Di Sang
{"title":"Novel pedestrian navigation system based on zero velocity update procedure technology and improved Sage-Husa adaptive Kalman filter with index fading memory factor","authors":"Lei Huang, Yuting Shi, Jianhua Wang, Xiaoqian Zhang, Daming Xu, Di Sang","doi":"10.1049/wss2.12050","DOIUrl":null,"url":null,"abstract":"<p>To acquire an accurate location on the occasions, such as in an indoor, tunnel, and valley, where satellite navigation signals fail. The paper designs a pedestrian navigation system by using the zero velocity update procedure technology (ZUPT) and Kalman filter to reduce the location error. The measurement noise characteristic (mean and variance) of the micro electro mechanical systems gyros is unknown and time variant, but in traditional studies, it is usually thought and calculated as a constant. So the optimality of the error estimation of the Kalman filter cannot be reached. To address this question, this paper proposes the improved Sage–Husa Adaptive Kalman Filter (SHAKF) based on the index fading memory factor to realise the state estimation of the Kalman filter and navigation error correction. The advantage of improved SHAKF is it can accurately estimate the state vector when the measurement noise is unknown and time variant. To verify the validity of novel navigation methods, walking experiments under outdoor environments and indoor environments are carried out. The results of actual walking experiments demonstrate that the proposed method can effectively reduce the pedestrian location error compared with the traditional ZUPT method. The mean location error is reduced by more than 10%, and the variance of the location error is reduced by more than 5%.</p>","PeriodicalId":51726,"journal":{"name":"IET Wireless Sensor Systems","volume":"13 2","pages":"48-57"},"PeriodicalIF":2.4000,"publicationDate":"2023-02-17","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/wss2.12050","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"IET Wireless Sensor Systems","FirstCategoryId":"1085","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1049/wss2.12050","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"TELECOMMUNICATIONS","Score":null,"Total":0}
引用次数: 0
Abstract
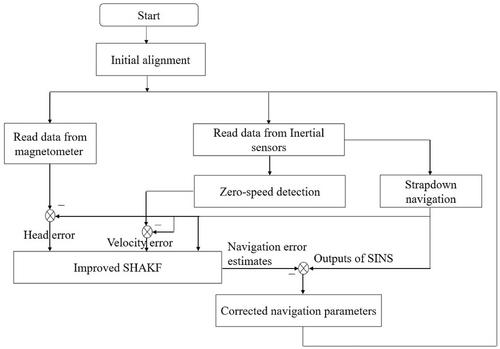
To acquire an accurate location on the occasions, such as in an indoor, tunnel, and valley, where satellite navigation signals fail. The paper designs a pedestrian navigation system by using the zero velocity update procedure technology (ZUPT) and Kalman filter to reduce the location error. The measurement noise characteristic (mean and variance) of the micro electro mechanical systems gyros is unknown and time variant, but in traditional studies, it is usually thought and calculated as a constant. So the optimality of the error estimation of the Kalman filter cannot be reached. To address this question, this paper proposes the improved Sage–Husa Adaptive Kalman Filter (SHAKF) based on the index fading memory factor to realise the state estimation of the Kalman filter and navigation error correction. The advantage of improved SHAKF is it can accurately estimate the state vector when the measurement noise is unknown and time variant. To verify the validity of novel navigation methods, walking experiments under outdoor environments and indoor environments are carried out. The results of actual walking experiments demonstrate that the proposed method can effectively reduce the pedestrian location error compared with the traditional ZUPT method. The mean location error is reduced by more than 10%, and the variance of the location error is reduced by more than 5%.
期刊介绍:
IET Wireless Sensor Systems is aimed at the growing field of wireless sensor networks and distributed systems, which has been expanding rapidly in recent years and is evolving into a multi-billion dollar industry. The Journal has been launched to give a platform to researchers and academics in the field and is intended to cover the research, engineering, technological developments, innovative deployment of distributed sensor and actuator systems. Topics covered include, but are not limited to theoretical developments of: Innovative Architectures for Smart Sensors;Nano Sensors and Actuators Unstructured Networking; Cooperative and Clustering Distributed Sensors; Data Fusion for Distributed Sensors; Distributed Intelligence in Distributed Sensors; Energy Harvesting for and Lifetime of Smart Sensors and Actuators; Cross-Layer Design and Layer Optimisation in Distributed Sensors; Security, Trust and Dependability of Distributed Sensors. The Journal also covers; Innovative Services and Applications for: Monitoring: Health, Traffic, Weather and Toxins; Surveillance: Target Tracking and Localization; Observation: Global Resources and Geological Activities (Earth, Forest, Mines, Underwater); Industrial Applications of Distributed Sensors in Green and Agile Manufacturing; Sensor and RFID Applications of the Internet-of-Things ("IoT"); Smart Metering; Machine-to-Machine Communications.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


