{"title":"Design and stability analysis of a solar-powered versatile patrol robot","authors":"Yifan Wang, Yuming Xue, Zhiyong Wang","doi":"10.1002/adc2.126","DOIUrl":null,"url":null,"abstract":"<p>In order to effectively solve the problem of energy autonomy of patrol robots in open-air working environment and free them from the limitation of power lines on their activity range. In this article, a solar-powered patrol robot based on a robot operating system is designed. The system adopts a modular design, using a master–slave distributed controller to control the robot's motion, and building an intelligent sensing system for the robot with various sensors. Meanwhile, flexible thin-film solar cells and lithium batteries form a folded multi-mode power supply system, which solves the problem of timely power supply. In addition, a simple and practical human–computer interaction interface is designed to facilitate viewing the robot's status. Finally, in order to verify the performance of the robot, the stability of the designed solar-powered patrol robot is verified through different experiments, which has a reference value and practical significance for the development of patrol robots.</p>","PeriodicalId":100030,"journal":{"name":"Advanced Control for Applications","volume":"5 2","pages":""},"PeriodicalIF":0.0000,"publicationDate":"2023-03-16","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advanced Control for Applications","FirstCategoryId":"1085","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/adc2.126","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
引用次数: 0
Abstract
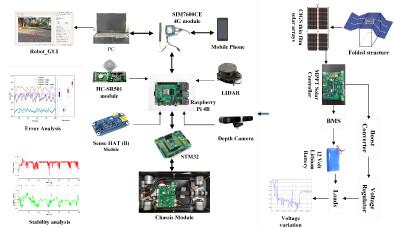
In order to effectively solve the problem of energy autonomy of patrol robots in open-air working environment and free them from the limitation of power lines on their activity range. In this article, a solar-powered patrol robot based on a robot operating system is designed. The system adopts a modular design, using a master–slave distributed controller to control the robot's motion, and building an intelligent sensing system for the robot with various sensors. Meanwhile, flexible thin-film solar cells and lithium batteries form a folded multi-mode power supply system, which solves the problem of timely power supply. In addition, a simple and practical human–computer interaction interface is designed to facilitate viewing the robot's status. Finally, in order to verify the performance of the robot, the stability of the designed solar-powered patrol robot is verified through different experiments, which has a reference value and practical significance for the development of patrol robots.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


