An improved semi-synthetic approach for creating visual-inertial odometry datasets
Abstract
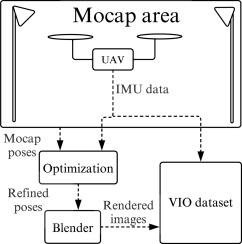
Capturing outdoor visual-inertial datasets is a challenging yet vital aspect of developing robust visual-inertial odometry (VIO) algorithms. A significant hurdle is that high-accuracy-ground-truth systems (e.g., motion capture) are not practical for outdoor use. One solution is to use a “semi-synthetic” approach that combines rendered images with real IMU data. This approach can produce sequences containing challenging imagery and accurate ground truth but with less simulated data than a fully synthetic sequence. Existing methods (used by popular tools/datasets) record IMU measurements from a visual-inertial system while measuring its trajectory using motion capture, then rendering images along that trajectory. This work identifies a major flaw in that approach, specifically that using motion capture alone to estimate the pose of the robot/system results in the generation of inconsistent visual-inertial data that is not suitable for evaluating VIO algorithms. However, we show that it is possible to generate high-quality semi-synthetic data for VIO algorithm evaluation. We do so using an open-source full-batch optimisation tool to incorporate both mocap and IMU measurements when estimating the IMU’s trajectory. We demonstrate that this improved trajectory results in better consistency between the IMU data and rendered images and that the resulting data improves VIO trajectory error by 79% compared to existing methods. Furthermore, we examine the effect of visual-inertial data inconsistency (as a result of trajectory noise) on VIO performance to provide a foundation for future work targeting real-time applications.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


