Multi-parameter e-skin based on biomimetic mechanoreceptors and stress field sensing
IF 12.3
1区 材料科学
Q1 ENGINEERING, ELECTRICAL & ELECTRONIC
引用次数: 3
Abstract
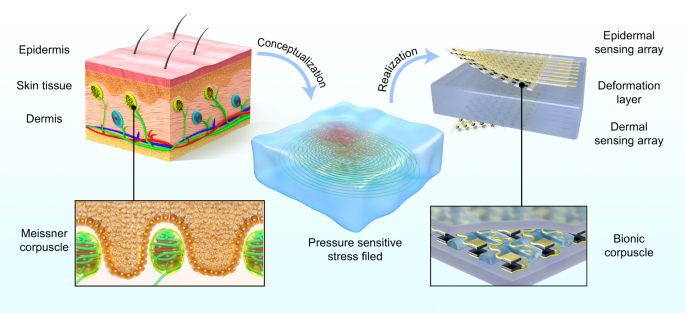
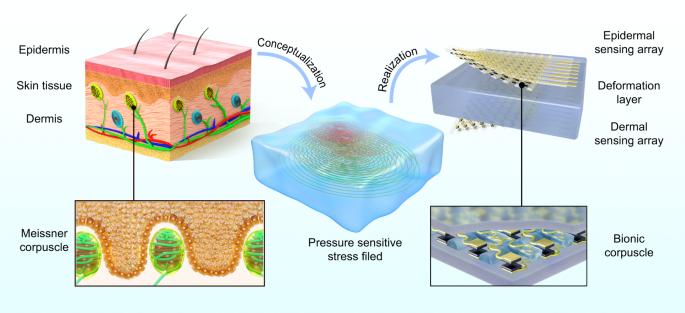
Tactile sensing has been a key challenge in robotic haptics. Inspired by how human skin sense the stress field with layered structure and distributed mechanoreceptors, we herein propose a design for modular multi-parameter perception electronic skin. With the stress field sensing concept, complex tactile signals can be transformed into field information. By analyzing the stress field, the real-time three-dimensional forces can be resolved with 1.8° polar angle resolution and 3.5° azimuthal angle resolution (achieved up to 71 folds of improvement in spatial resolution), we can also detect the hardness of object in contact with the electronic skin. Moreover, we demonstrate random assembly of the sensing arrays and integration of our electronic skin onto differently curved surfaces do not lead to any measurement variation of the stress field. This result reveals that the sensing elements in our electronic skin system can be modularly made and exchanged for specific applications.
基于仿生机械感受器和应力场传感的多参数电子皮肤
触觉传感一直是机器人触觉技术的关键挑战。受人类皮肤如何通过分层结构和分布式机械感受器感知应力场的启发,我们在此提出了一种模块化多参数感知电子皮肤设计。利用应力场感应概念,可以将复杂的触觉信号转化为应力场信息。通过分析应力场,我们可以以 1.8° 的极角分辨率和 3.5° 的方位角分辨率(实现了高达 71 倍的空间分辨率提升)解析实时三维力,我们还可以检测与电子皮肤接触的物体的硬度。此外,我们还证明了传感阵列的随机组装和电子皮肤在不同曲面上的集成不会导致应力场的任何测量变化。这一结果表明,我们的电子皮肤系统中的传感元件可以模块化制造,并可根据具体应用进行更换。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

npj Flexible Electronics
Multiple-
CiteScore
17.10
自引率
4.80%
发文量
91
审稿时长
6 weeks
期刊介绍:
npj Flexible Electronics is an online-only and open access journal, which publishes high-quality papers related to flexible electronic systems, including plastic electronics and emerging materials, new device design and fabrication technologies, and applications.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


