Bowen Jiang, Nimananda Sharma, Yujing Liu, Chuan Li
{"title":"Acceleration-based wheel slip control realized with decentralised electric drivetrain systems","authors":"Bowen Jiang, Nimananda Sharma, Yujing Liu, Chuan Li","doi":"10.1049/els2.12044","DOIUrl":null,"url":null,"abstract":"<p>Traction control is one of the most important functions in vehicle drivetrain systems. When a vehicle is driven on a low-friction road surface, loss of traction force can cause the driven wheels to spin. This reduces vehicle acceleration performance and can even cause the driver to lose control of the vehicle. The high bandwidth of electric machine control in electric vehicles gives more possibilities to regulate driving torque on wheels and prevent wheel spin. An acceleration-based wheel slip control is designed and investigated. Compared to traditional slip-based traction control, the proposed method does not depend on the estimation of the vehicle speed and only relies on the driven wheel rotational acceleration. The control method is verified using the simulation of an electric vehicle with a decentralised electric drivetrain system. The vehicle and the electric drive are modelled in CarMaker and PLECS, respectively. The simulation results show that the proposed method is able to prevent the driven wheel from spinning when the vehicle is accelerated on an ice road. In addition, the control is fast enough and requires only half a second to reduce the wheel acceleration to a normal range.</p>","PeriodicalId":48518,"journal":{"name":"IET Electrical Systems in Transportation","volume":"12 2","pages":"143-152"},"PeriodicalIF":2.2000,"publicationDate":"2022-05-05","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://ietresearch.onlinelibrary.wiley.com/doi/epdf/10.1049/els2.12044","citationCount":"3","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"IET Electrical Systems in Transportation","FirstCategoryId":"5","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1049/els2.12044","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
引用次数: 3
Abstract
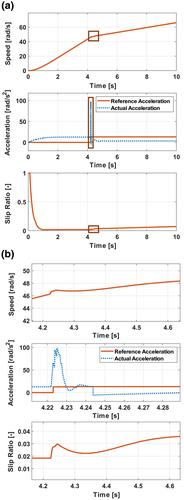
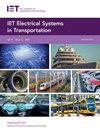
Traction control is one of the most important functions in vehicle drivetrain systems. When a vehicle is driven on a low-friction road surface, loss of traction force can cause the driven wheels to spin. This reduces vehicle acceleration performance and can even cause the driver to lose control of the vehicle. The high bandwidth of electric machine control in electric vehicles gives more possibilities to regulate driving torque on wheels and prevent wheel spin. An acceleration-based wheel slip control is designed and investigated. Compared to traditional slip-based traction control, the proposed method does not depend on the estimation of the vehicle speed and only relies on the driven wheel rotational acceleration. The control method is verified using the simulation of an electric vehicle with a decentralised electric drivetrain system. The vehicle and the electric drive are modelled in CarMaker and PLECS, respectively. The simulation results show that the proposed method is able to prevent the driven wheel from spinning when the vehicle is accelerated on an ice road. In addition, the control is fast enough and requires only half a second to reduce the wheel acceleration to a normal range.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


