3D-printed PEDOT:PSS for soft robotics
IF 79.8
1区 材料科学
Q1 MATERIALS SCIENCE, MULTIDISCIPLINARY
引用次数: 0
Abstract
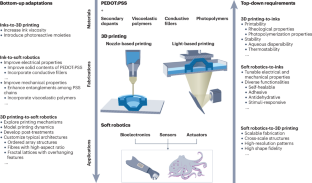
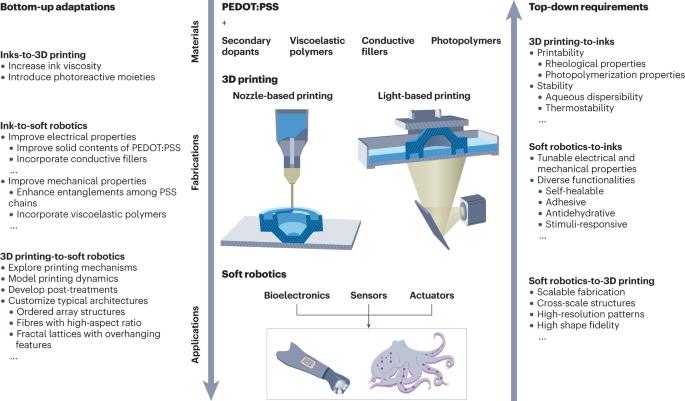
Soft robotics is an emerging technology requiring conductive materials with inherently high compliance to sense, control or actuate. Poly(3,4-ethylenedioxythiophene):polystyrene sulfonate (PEDOT:PSS) is a soft and flexible conducting polymer with tunable mechanical properties, mixed ionic and electronic conductivity and excellent processability. Combining PEDOT:PSS with advanced 3D printing has ushered unprecedented opportunities in soft material engineering and soft robotics. In this Review, we aim to bridge the gap between different research areas by specifically discussing the use of PEDOT:PSS-based inks in 3D printing for soft robotics. We discuss rational PEDOT:PSS-based ink design and evaluation, 3D-printing technologies and strategies as well as applications for soft robotics. We provide insights into the theoretical background and fundamental aspects of the 3D printing of conducting polymers, with the goal of accelerating soft robotics development. Combining poly(3,4-ethylenedioxythiophene):polystyrene sulfonate (PEDOT:PSS) with 3D-printing techniques enables the customization of compliant conductive materials for soft robotics, towards the goal of merging humans and robots. This Review discusses the fundamentals of 3D-printed PEDOT:PSS for soft robotics, from printable ink design and evaluation to printing strategies and promising soft robotic systems.
3D打印PEDOT:PSS用于软机器人
软机器人技术是一项新兴技术,需要具有内在高顺应性的导电材料来感知、控制或驱动。聚(3,4-亚乙二氧基噻吩):聚苯乙烯磺酸盐(PEDOT:PSS)是一种柔软而灵活的导电聚合物,具有可调的机械性能、混合离子导电性和电子导电性以及出色的可加工性。将 PEDOT:PSS 与先进的 3D 打印技术相结合,为软材料工程和软机器人技术带来了前所未有的机遇。在本综述中,我们将专门讨论基于 PEDOT:PSS 的油墨在软机器人 3D 打印中的应用,旨在弥合不同研究领域之间的差距。我们讨论了基于 PEDOT:PSS 的合理油墨设计和评估、3D 打印技术和策略以及在软机器人技术中的应用。我们深入探讨了导电聚合物三维打印的理论背景和基本方面,旨在加快软机器人技术的发展。将聚(3,4-亚乙二氧基噻吩):聚苯乙烯磺酸盐(PEDOT:PSS)与三维打印技术相结合,可为软机器人定制符合要求的导电材料,从而实现人与机器人融合的目标。本综述讨论了用于软机器人技术的三维打印 PEDOT:PSS 的基本原理,包括可打印墨水的设计和评估、打印策略以及前景广阔的软机器人系统。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Nature Reviews Materials
Materials Science-Biomaterials
CiteScore
119.40
自引率
0.40%
发文量
107
期刊介绍:
Nature Reviews Materials is an online-only journal that is published weekly. It covers a wide range of scientific disciplines within materials science. The journal includes Reviews, Perspectives, and Comments.
Nature Reviews Materials focuses on various aspects of materials science, including the making, measuring, modelling, and manufacturing of materials. It examines the entire process of materials science, from laboratory discovery to the development of functional devices.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


