Design and Evaluation of a Balanced Compliant Laparoscopic Grasper
IF 4.4
3区 医学
Q2 ENGINEERING, BIOMEDICAL
IEEE Journal of Translational Engineering in Health and Medicine-Jtehm
Pub Date : 2023-07-03
DOI:10.1109/JTEHM.2023.3291925
引用次数: 0
Abstract
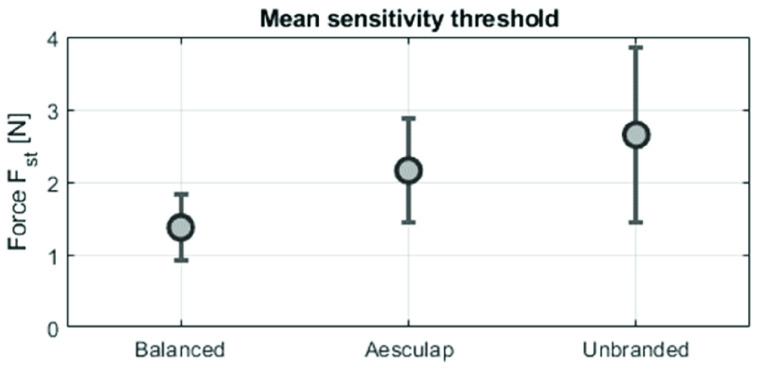
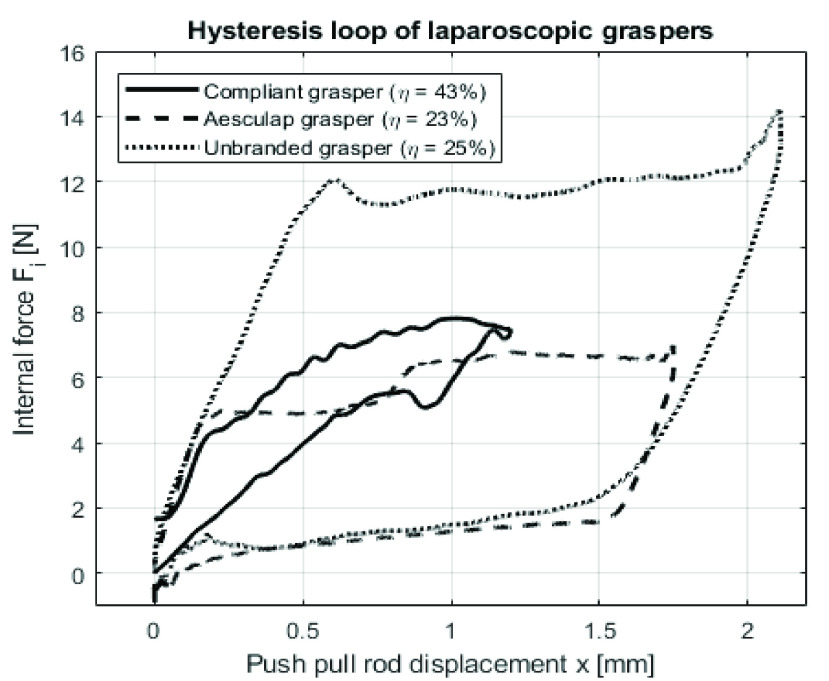
In laparoscopic surgery, quality of haptic feedback is reduced compared to conventional surgery, leading to unintentional tissue damage during grasping. From the perspective of haptics, poor mechanical design of laparoscopic instrument joints induces friction and a nonlinear actuation-tip force relation. In this study, a novel laparoscopic grasper using compliant joints and a magnetic balancer is presented, and the reduction in hysteresis and friction is evaluated. The hysteresis loop of the novel compliant grasper and two conventional laparoscopic graspers (high quality leading commercial brand and low quality unbranded grasper) were measured. In order to assess quality of haptic feedback, the lowest grasper tip load perceivable by instrument users was measured with the novel and the conventional laparoscopic graspers. The hysteresis loop measurement yielded a mechanical efficiency of 43% for the novel grasper, compared to- 25% and 23% for the Aesculap and the unbranded grasper, respectively. The forces perceivable by the user through the novel grasper were significantly lower (mean 1.37N, SD 0.44N) than those of conventional graspers (mean 2.15N, SD 0.71N and mean 2.65N, SD 1.20N, respectively). The balanced compliant grasper technology has the ability to improve the quality of haptic feedback compared to conventional laparoscopic graspers. Research is needed to relate these results to soft and delicate tissue grasping in a clinical setting, for which this instrument is intended.
平衡顺应性腹腔镜抓取器的设计与评价。
在腹腔镜手术中,与传统手术相比,触觉反馈的质量降低,导致抓握过程中无意的组织损伤。从触觉的角度来看,腹腔镜器械关节的机械设计不佳会导致摩擦和非线性的致动-尖端-力关系。在这项研究中,提出了一种新型的腹腔镜抓取器,该抓取器使用柔性关节和磁性平衡器,并评估了磁滞和摩擦的减少。测量了新型顺应性抓取器和两种传统腹腔镜抓取器(高质量领先商业品牌和低质量无品牌抓取器)的磁滞回线。为了评估触觉反馈的质量,使用新型和传统腹腔镜抓握器测量仪器用户可感知的最低抓握器尖端负载。磁滞回线测量结果表明,新型抓持器的机械效率为43%,而Aesculap和无品牌抓持器分别为-25%和23%。使用者通过新型抓握器可感知的力(平均1.37N,SD 0.44N)显著低于传统抓握器的力(分别为平均2.15N,SD 0.71N和平均2.65N,SD 1.20N)。与传统腹腔镜抓握器相比,平衡柔顺抓握器技术能够提高触觉反馈的质量。需要进行研究,将这些结果与临床环境中柔软细腻的组织抓取联系起来,这就是该仪器的用途。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

IEEE Journal of Translational Engineering in Health and Medicine-Jtehm
Engineering-Biomedical Engineering
CiteScore
7.40
自引率
2.90%
发文量
65
审稿时长
27 weeks
期刊介绍:
The IEEE Journal of Translational Engineering in Health and Medicine is an open access product that bridges the engineering and clinical worlds, focusing on detailed descriptions of advanced technical solutions to a clinical need along with clinical results and healthcare relevance. The journal provides a platform for state-of-the-art technology directions in the interdisciplinary field of biomedical engineering, embracing engineering, life sciences and medicine. A unique aspect of the journal is its ability to foster a collaboration between physicians and engineers for presenting broad and compelling real world technological and engineering solutions that can be implemented in the interest of improving quality of patient care and treatment outcomes, thereby reducing costs and improving efficiency. The journal provides an active forum for clinical research and relevant state-of the-art technology for members of all the IEEE societies that have an interest in biomedical engineering as well as reaching out directly to physicians and the medical community through the American Medical Association (AMA) and other clinical societies. The scope of the journal includes, but is not limited, to topics on: Medical devices, healthcare delivery systems, global healthcare initiatives, and ICT based services; Technological relevance to healthcare cost reduction; Technology affecting healthcare management, decision-making, and policy; Advanced technical work that is applied to solving specific clinical needs.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


