{"title":"Model-Based Mid-Level Regulation for Assist-As-Needed Hierarchical Control of Wearable Robots: A Computational Study of Human-Robot Adaptation.","authors":"Ali Nasr, Arash Hashemi, John McPhee","doi":"10.3390/robotics11010020","DOIUrl":null,"url":null,"abstract":"<p><p>The closed-loop human-robot system requires developing an effective robotic controller that considers models of both the human and the robot, as well as human adaptation to the robot. This paper develops a mid-level controller providing assist-as-needed (AAN) policies in a hierarchical control setting using two novel methods: model-based and fuzzy logic rule. The goal of AAN is to provide the required extra torque because of the robot's dynamics and external load compared to the human limb free movement. The human-robot adaptation is simulated using a nonlinear model predictive controller (NMPC) as the human central nervous system (CNS) for three conditions of initial (the initial session of wearing the robot, without any previous experience), short-term (the entire first session, e.g., 45 min), and long-term experiences. The results showed that the two methods (model-based and fuzzy logic) outperform the traditional proportional method in providing AAN by considering distinctive human and robot models. Additionally, the CNS actuator model has difficulty in the initial experience and activates both antagonist and agonist muscles to reduce movement oscillations. In the long-term experience, the simulation shows no oscillation when the CNS NMPC learns the robot model and modifies its weights to simulate realistic human behavior. We found that the desired strength of the robot should be increased gradually to ignore unexpected human-robot interactions (e.g., robot vibration, human spasticity). The proposed mid-level controllers can be used for wearable assistive devices, exoskeletons, and rehabilitation robots.</p>","PeriodicalId":37568,"journal":{"name":"Robotics","volume":"11 1","pages":"20"},"PeriodicalIF":3.3000,"publicationDate":"2022-01-29","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC8989382/pdf/","citationCount":"8","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Robotics","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.3390/robotics11010020","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2022/2/1 0:00:00","PubModel":"eCollection","JCR":"Q2","JCRName":"ROBOTICS","Score":null,"Total":0}
引用次数: 8
Abstract
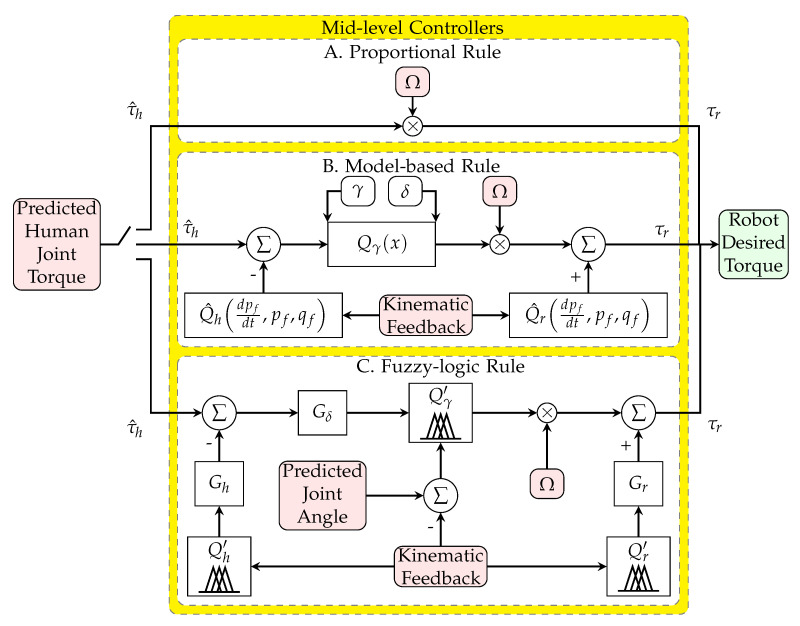
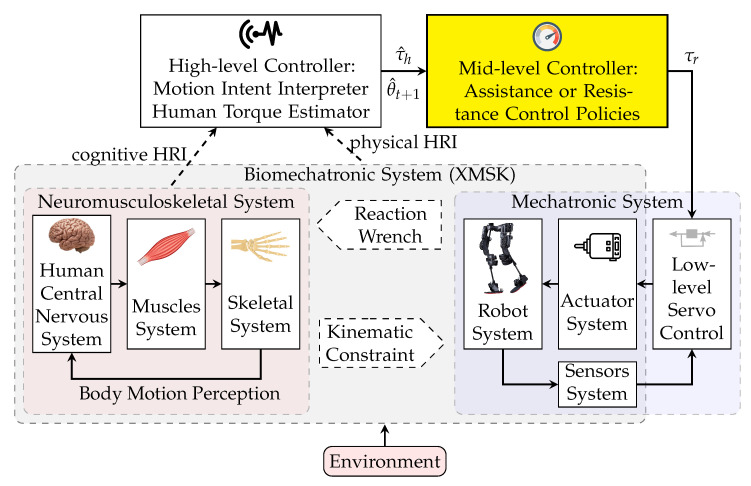
The closed-loop human-robot system requires developing an effective robotic controller that considers models of both the human and the robot, as well as human adaptation to the robot. This paper develops a mid-level controller providing assist-as-needed (AAN) policies in a hierarchical control setting using two novel methods: model-based and fuzzy logic rule. The goal of AAN is to provide the required extra torque because of the robot's dynamics and external load compared to the human limb free movement. The human-robot adaptation is simulated using a nonlinear model predictive controller (NMPC) as the human central nervous system (CNS) for three conditions of initial (the initial session of wearing the robot, without any previous experience), short-term (the entire first session, e.g., 45 min), and long-term experiences. The results showed that the two methods (model-based and fuzzy logic) outperform the traditional proportional method in providing AAN by considering distinctive human and robot models. Additionally, the CNS actuator model has difficulty in the initial experience and activates both antagonist and agonist muscles to reduce movement oscillations. In the long-term experience, the simulation shows no oscillation when the CNS NMPC learns the robot model and modifies its weights to simulate realistic human behavior. We found that the desired strength of the robot should be increased gradually to ignore unexpected human-robot interactions (e.g., robot vibration, human spasticity). The proposed mid-level controllers can be used for wearable assistive devices, exoskeletons, and rehabilitation robots.
期刊介绍:
Robotics publishes original papers, technical reports, case studies, review papers and tutorials in all the aspects of robotics. Special Issues devoted to important topics in advanced robotics will be published from time to time. It particularly welcomes those emerging methodologies and techniques which bridge theoretical studies and applications and have significant potential for real-world applications. It provides a forum for information exchange between professionals, academicians and engineers who are working in the area of robotics, helping them to disseminate research findings and to learn from each other’s work. Suitable topics include, but are not limited to: -intelligent robotics, mechatronics, and biomimetics -novel and biologically-inspired robotics -modelling, identification and control of robotic systems -biomedical, rehabilitation and surgical robotics -exoskeletons, prosthetics and artificial organs -AI, neural networks and fuzzy logic in robotics -multimodality human-machine interaction -wireless sensor networks for robot navigation -multi-sensor data fusion and SLAM

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


