Bioinspired Soft Robotics: How Do We Learn From Creatures?
IF 17.2
1区 工程技术
Q1 ENGINEERING, BIOMEDICAL
引用次数: 3
Abstract
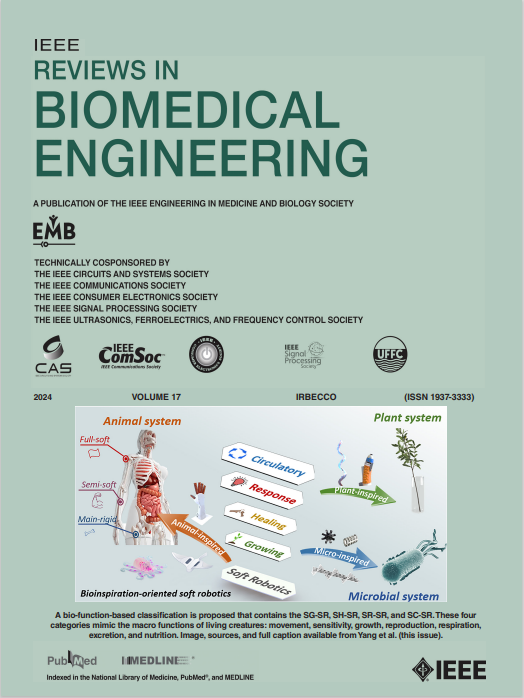
Soft robotics has opened a unique path to flexibility and environmental adaptability, learning from nature and reproducing biological behaviors. Nature implies answers for how to apply robots to real life. To find out how we learn from creatures to design and apply soft robots, in this Review, we propose a classification method to summarize soft robots based on different functions of biological systems: self-growing, self-healing, self-responsive, and self-circulatory. The bio-function based classification logic is presented to explain生物启发软机器人技术:我们如何向生物学习?
软机器人技术为实现灵活性和环境适应性、向自然学习和再现生物行为开辟了一条独特的道路。自然为如何将机器人应用于现实生活提供了答案。为了了解我们如何向生物学习来设计和应用软机器人,在这篇综述中,我们提出了一种分类方法,根据生物系统的不同功能对软机器人进行归纳:自生长、自愈合、自响应和自循环。基于生物功能的分类逻辑可以解释我们为什么要向生物学习。分析了这些类别的最新技术、特点、利弊、挑战和潜在应用,以说明我们从生物身上学到了什么。通过对这些类别的交叉分析,概述并展望了现有和潜在的生物启发应用,最终找到答案,即我们如何从生物身上学习。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊
IEEE Reviews in Biomedical Engineering
Engineering-Biomedical Engineering
CiteScore
31.70
自引率
0.60%
发文量
93
期刊介绍:
IEEE Reviews in Biomedical Engineering (RBME) serves as a platform to review the state-of-the-art and trends in the interdisciplinary field of biomedical engineering, which encompasses engineering, life sciences, and medicine. The journal aims to consolidate research and reviews for members of all IEEE societies interested in biomedical engineering. Recognizing the demand for comprehensive reviews among authors of various IEEE journals, RBME addresses this need by receiving, reviewing, and publishing scholarly works under one umbrella. It covers a broad spectrum, from historical to modern developments in biomedical engineering and the integration of technologies from various IEEE societies into the life sciences and medicine.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


