A hierarchically patterned, bioinspired e-skin able to detect the direction of applied pressure for robotics
IF 26.1
1区 计算机科学
Q1 ROBOTICS
引用次数: 459
Abstract
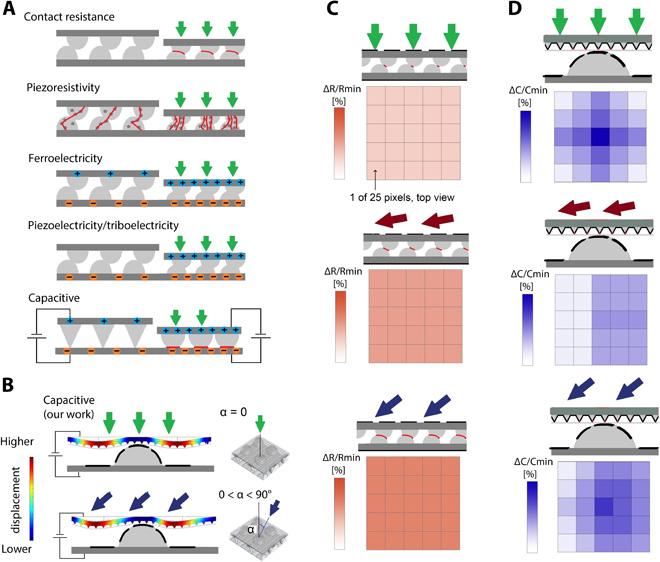
Tactile sensing is required for the dexterous manipulation of objects in robotic applications. In particular, the ability to measure and distinguish in real time normal and shear forces is crucial for slip detection and interaction with fragile objects. Here, we report a biomimetic soft electronic skin (e-skin) that is composed of an array of capacitors and capable of measuring and discriminating in real time both normal and tangential forces. It is enabled by a three-dimensional structure that mimics the interlocked dermis-epidermis interface in human skin. Moreover, pyramid microstructures arranged along nature-inspired phyllotaxis spirals resulted in an e-skin with increased sensitivity, minimal hysteresis, excellent cycling stability, and response time in the millisecond range. The e-skin provided sensing feedback for controlling a robot arm in various tasks, illustrating its potential application in robotics with tactile feedback.
分层图案生物启发电子皮肤能够检测机器人施加压力的方向
在机器人应用中,灵巧地操纵物体需要触觉传感。特别是,实时测量和区分法向力和剪切力的能力对于滑移检测和与易碎物体的交互至关重要。在这里,我们报告了一种仿生软电子皮肤(e-skin),它由电容器阵列组成,能够实时测量和分辨法向力和切向力。它的三维结构模仿了人体皮肤中真皮-表皮交错的界面。此外,金字塔微结构沿自然启发的植物轴螺旋排列,使电子皮肤具有更高的灵敏度、最小的滞后、出色的循环稳定性和毫秒级的响应时间。这种电子皮肤为控制机械臂完成各种任务提供了传感反馈,说明了它在具有触觉反馈的机器人技术中的潜在应用。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Science Robotics
Mathematics-Control and Optimization
CiteScore
30.60
自引率
2.80%
发文量
83
期刊介绍:
Science Robotics publishes original, peer-reviewed, science- or engineering-based research articles that advance the field of robotics. The journal also features editor-commissioned Reviews. An international team of academic editors holds Science Robotics articles to the same high-quality standard that is the hallmark of the Science family of journals.
Sub-topics include: actuators, advanced materials, artificial Intelligence, autonomous vehicles, bio-inspired design, exoskeletons, fabrication, field robotics, human-robot interaction, humanoids, industrial robotics, kinematics, machine learning, material science, medical technology, motion planning and control, micro- and nano-robotics, multi-robot control, sensors, service robotics, social and ethical issues, soft robotics, and space, planetary and undersea exploration.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


