A seed-inspired 3D electroionic flier with obliquely embossed ionic polymer actuators for tunable autorotation and lift
IF 7.6
Q1 BIOTECHNOLOGY & APPLIED MICROBIOLOGY
引用次数: 0
Abstract
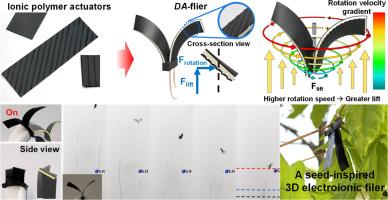
In nature, many plants disperse their seeds with simple wing structures that ride the wind, slow descent, and carry propagules farther. These natural flight morphologies offer blueprints for low-mass, passively stable autorotation and lift generation. Despite extensive seed-mimicking efforts based on this inspiration, most research using stimuli-responsive actuators has focused on reproducing simple bending-dominated shapes rather than on the kinematic flight control of seeds, resulting in only a limited mimicry of the aerodynamic flight of seeds. Here we demonstrate a geometry-programmed ionic polymer actuator approach that enables controllable autorotation in three-dimensional electroionic fliers. Embossed Nafion membranes are patterned so that the pitch sets the magnitude of bending bias and the oblique orientation induces twist, resulting in coupled bending-twisting motion. Asymmetry varies non-monotonically with pitch, reaching at maximum at 1.6 mm, arising from the interplay between reduced ion-ion repulsion at the patterned surface and mechanical stiffening from rib-like surface relief. At 1.5 V and 0.1 Hz sinusoidal input, peak displacements reach -2.76/2.04 mm (embossed/smooth), whereas square-wave input increases displacement to -3.71/2.66 mm and raises asymmetry from 0.72 to 1.05 mm. Assembled from these actuators, a 3D electroionic flier emulating the aerodynamic mechanisms of two different wind-dispersed seeds exhibits a descent speed of 2.980 m s−1 in a drop test, the lowest among the tested fliers. These results position geometry-programmable ionic polymer actuation as a scalable pathway to autorotation and lift tuning, which should allow the realization of advanced seed-mimetic deployment systems and soft aerial microrobots.
一种受种子启发的三维电子离子飞行器,具有倾斜压纹离子聚合物致动器,可调自旋和升力
在自然界中,许多植物通过简单的翅膀结构来传播种子,这种结构可以顺风而行,缓慢下降,并将繁殖体传播得更远。这些自然的飞行形态为低质量、被动稳定的自旋和升力产生提供了蓝图。尽管基于这一灵感进行了大量的种子模拟工作,但大多数使用刺激响应致动器的研究都集中在复制简单的弯曲主导形状,而不是种子的运动学飞行控制,导致对种子气动飞行的模拟有限。在这里,我们展示了一种几何编程的离子聚合物致动器方法,使三维电子离子飞行器的可控自旋成为可能。压花Nafion膜的图案使俯仰设置弯曲偏差的大小,倾斜方向诱导扭曲,导致耦合弯曲-扭转运动。不对称性随螺距非单调变化,在1.6 mm处达到最大值,这是由于图案表面离子-离子斥力的减少和肋状表面浮雕的机械硬化之间的相互作用造成的。在1.5 V和0.1 Hz正弦输入下,峰值位移达到-2.76/2.04 mm(浮雕/光滑),而方波输入将位移增加到-3.71/2.66 mm,并将不对称性从0.72提高到1.05 mm。由这些致动器组装而成的模拟两种不同风散种子气动机理的三维电子离子飞行器,在跌落试验中下降速度为2.980 ms−1,是试验飞行器中最低的。这些结果将几何可编程离子聚合物驱动定位为一种可扩展的自旋和升力调谐途径,这将允许实现先进的模拟种子部署系统和软空中微型机器人。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊
Sensors and Actuators Reports
Multiple-
CiteScore
9.60
自引率
0.00%
发文量
60
审稿时长
49 days
期刊介绍:
Sensors and Actuators Reports is a peer-reviewed open access journal launched out from the Sensors and Actuators journal family. Sensors and Actuators Reports is dedicated to publishing new and original works in the field of all type of sensors and actuators, including bio-, chemical-, physical-, and nano- sensors and actuators, which demonstrates significant progress beyond the current state of the art. The journal regularly publishes original research papers, reviews, and short communications.
For research papers and short communications, the journal aims to publish the new and original work supported by experimental results and as such purely theoretical works are not accepted.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


