Michael Tim-Yun Ong, Chuan He, Wei Chai, Rex Wang-Fung Mak, Cham-Kit Wong, Gloria Yan-Ting Lam, Tsz Lung Choi, Patrick Shu-Hang Yung
{"title":"Surgical accuracy of open platform image-based robotic-assisted total knee arthroplasty across different implants: a multicentre trial.","authors":"Michael Tim-Yun Ong, Chuan He, Wei Chai, Rex Wang-Fung Mak, Cham-Kit Wong, Gloria Yan-Ting Lam, Tsz Lung Choi, Patrick Shu-Hang Yung","doi":"10.1186/s42836-025-00334-x","DOIUrl":null,"url":null,"abstract":"<p><strong>Background: </strong>Implant malalignment in total knee arthroplasty (TKA) correlates with poor outcomes, and robotic-assisted systems aim to improve precision. While closed-platform robotic systems dominate the market, their restriction to proprietary implants limits surgical flexibility. This study evaluates the radiological accuracy of an open-platform robotic system (Yuanhua KUNWU) across four TKA implant designs.</p><p><strong>Methods: </strong>A multi-centre retrospective analysis of 129 robotic-assisted TKAs (Zhengtian Irene, n = 60; DePuy Synthes Attune, n = 32; Zimmer Biomet Persona, n = 20; Smith & Nephew Legion, n = 17) was conducted. Patients with end-stage osteoarthritis (Kellgren-Lawrence grade 3-4) were included, while those with prior knee surgery or complex anatomy were excluded (n = 15). A total of 114 pre-operative and post-operative alignment (hip-knee-ankle angle [HKA], femoral and tibial component coronal angles [FCCA, TCCA], posterior tibial slope [PTS]) were measured on radiographs by two independent reviewers. Interobserver reliability (intra-class correlation [ICC], Cronbach's α) and deviations from planned alignment (paired t-tests) were analysed. Acceptability was defined as ≤ 3° deviation.</p><p><strong>Results: </strong>Interobserver reliability was excellent (ICC > 0.77, Cronbach's α > 0.87 for all parameters). Mean post-operative deviations from planned alignment were clinically small: HKA (+1.32°, P < 0.001), FCCA (-0.55°, P < 0.001), TCCA (+0.19°, P = 0.097), and PTS (-0.42°, P = 0.018). All mean differences were within the 3° acceptability threshold. Subgroup analysis of pre- and post-operative alignment between implant types also showed deviations of < 3°.</p><p><strong>Conclusions: </strong>The KUNWU open-platform robotic system achieved high radiological accuracy across four implant designs, with alignment deviations < 1.5°. This suggests open-platform robotics can provide implant versatility without compromising precision. Further studies regarding the assessment of long-term clinical and patient-reported outcomes and comparison with closed-platform systems are warranted.</p>","PeriodicalId":52831,"journal":{"name":"Arthroplasty","volume":"7 1","pages":"50"},"PeriodicalIF":4.3000,"publicationDate":"2025-10-07","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12502208/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Arthroplasty","FirstCategoryId":"3","ListUrlMain":"https://doi.org/10.1186/s42836-025-00334-x","RegionNum":4,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ORTHOPEDICS","Score":null,"Total":0}
引用次数: 0
Abstract
Background: Implant malalignment in total knee arthroplasty (TKA) correlates with poor outcomes, and robotic-assisted systems aim to improve precision. While closed-platform robotic systems dominate the market, their restriction to proprietary implants limits surgical flexibility. This study evaluates the radiological accuracy of an open-platform robotic system (Yuanhua KUNWU) across four TKA implant designs.
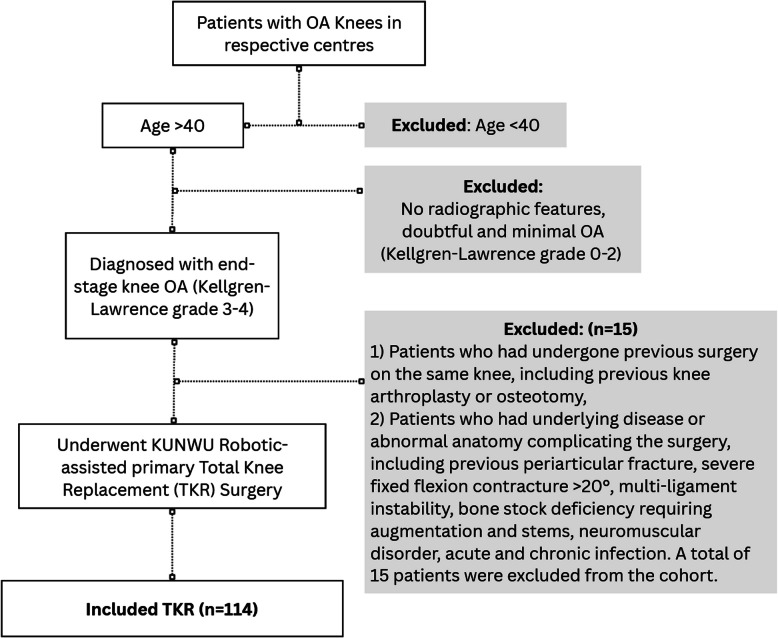
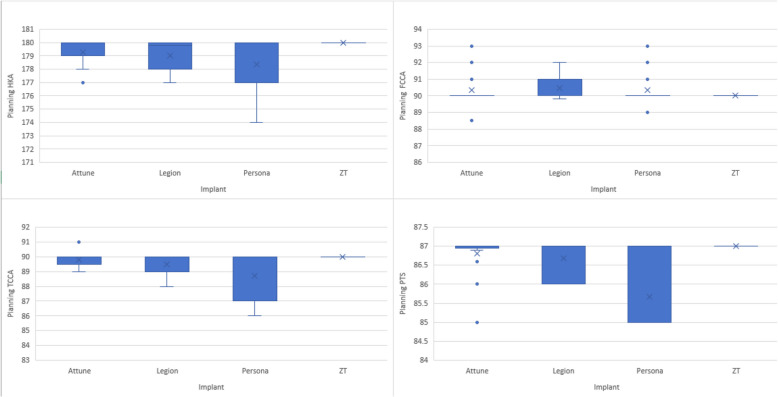
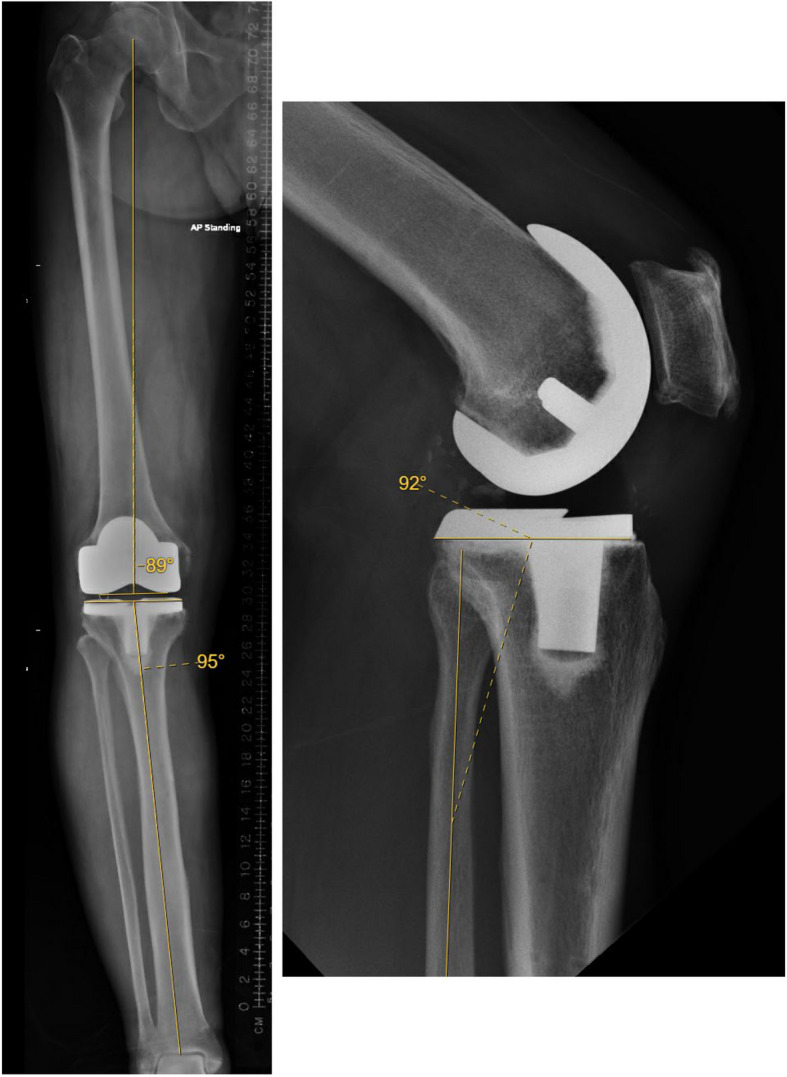
Methods: A multi-centre retrospective analysis of 129 robotic-assisted TKAs (Zhengtian Irene, n = 60; DePuy Synthes Attune, n = 32; Zimmer Biomet Persona, n = 20; Smith & Nephew Legion, n = 17) was conducted. Patients with end-stage osteoarthritis (Kellgren-Lawrence grade 3-4) were included, while those with prior knee surgery or complex anatomy were excluded (n = 15). A total of 114 pre-operative and post-operative alignment (hip-knee-ankle angle [HKA], femoral and tibial component coronal angles [FCCA, TCCA], posterior tibial slope [PTS]) were measured on radiographs by two independent reviewers. Interobserver reliability (intra-class correlation [ICC], Cronbach's α) and deviations from planned alignment (paired t-tests) were analysed. Acceptability was defined as ≤ 3° deviation.
Results: Interobserver reliability was excellent (ICC > 0.77, Cronbach's α > 0.87 for all parameters). Mean post-operative deviations from planned alignment were clinically small: HKA (+1.32°, P < 0.001), FCCA (-0.55°, P < 0.001), TCCA (+0.19°, P = 0.097), and PTS (-0.42°, P = 0.018). All mean differences were within the 3° acceptability threshold. Subgroup analysis of pre- and post-operative alignment between implant types also showed deviations of < 3°.
Conclusions: The KUNWU open-platform robotic system achieved high radiological accuracy across four implant designs, with alignment deviations < 1.5°. This suggests open-platform robotics can provide implant versatility without compromising precision. Further studies regarding the assessment of long-term clinical and patient-reported outcomes and comparison with closed-platform systems are warranted.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


