4D-Printed Microrobots with Synergistic Integration of Magnetic Actuation, Diffractive Optical Sensing, and pH-Adaptive Morphing
IF 19
1区 材料科学
Q1 CHEMISTRY, MULTIDISCIPLINARY
引用次数: 0
Abstract
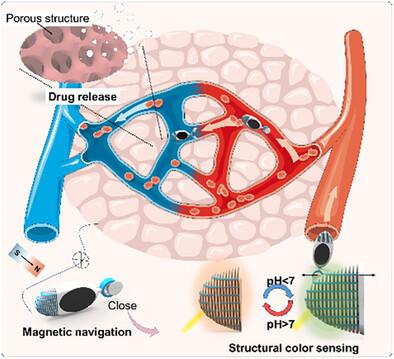
Soft microrobots exhibit distinct advantages in biomedical applications, with their exceptional maneuverability in confined spaces and environmental adaptability offering innovative solutions for targeted theranostics. However, current systems are inherently constrained by the physical separation of sensing and actuation modules, leading to inadequate integration and operational efficiency that hinder practical implementation. To overcome this challenge, a micro-nano 4D printing design paradigm is proposed. Through spatial programming of multi-responsive materials and biomimetic microstructural engineering, a microrobotic system is fabricated with synergistic perception-actuation capabilities. By integrating gradient magnetic field-responsive composites and pH-sensitive hydrogels, a 150-µm-scale biomimetic fish-shaped microrobot is developed, innovatively integrating three functionalities: magnetic-actuation, pH-triggered joint actuation, and diffractive optical sensing. Specifically, its tail joint enables adaptive modulation of doxorubicin release kinetics via pH-mediated mechanical deformation, while the head-mounted diffractive spectral sensor provides dynamic optical feedback of pathological microenvironment pH (5.0–6.5). Proof-of-concept experiments demonstrate the system's precise drug release control and environmental monitoring capabilities in gastric cancer cell therapy. This work provides a 4D printing design approach for next-generation intelligent therapeutic microrobots capable of environmental perception, intelligent response, and precise execution.
磁驱动、衍射光学传感和ph -自适应变形协同集成的4d打印微型机器人
软微型机器人在生物医学应用中表现出明显的优势,其在密闭空间和环境适应性方面的卓越机动性为靶向治疗提供了创新的解决方案。然而,目前的系统受到传感和驱动模块物理分离的固有限制,导致集成和操作效率不足,阻碍了实际实施。为了克服这一挑战,提出了一种微纳4D打印设计范式。通过多响应材料的空间规划和仿生微结构工程,构建了具有协同感知驱动能力的微型机器人系统。通过集成梯度磁场响应复合材料和ph敏感水凝胶,开发了150微米尺度的仿生鱼形微型机器人,创新地集成了磁驱动、ph触发关节驱动和衍射光学传感三种功能。具体来说,它的尾部关节可以通过pH介导的机械变形自适应调节阿霉素释放动力学,而头戴式衍射光谱传感器提供病理微环境pH(5.0-6.5)的动态光学反馈。概念验证实验证明了该系统在胃癌细胞治疗中的精确药物释放控制和环境监测能力。这项工作为下一代具有环境感知、智能响应和精确执行能力的智能治疗微型机器人提供了一种4D打印设计方法。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊
Advanced Functional Materials
工程技术-材料科学:综合
CiteScore
29.50
自引率
4.20%
发文量
2086
审稿时长
2.1 months
期刊介绍:
Firmly established as a top-tier materials science journal, Advanced Functional Materials reports breakthrough research in all aspects of materials science, including nanotechnology, chemistry, physics, and biology every week.
Advanced Functional Materials is known for its rapid and fair peer review, quality content, and high impact, making it the first choice of the international materials science community.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


