{"title":"Variational Bayesian Innovation Saturation Kalman Filter for Micro-Electro-Mechanical System-Inertial Navigation System/Polarization Compass Integrated Navigation.","authors":"Yu Sun, Xiaojie Liu, Xiaochen Liu, Huijun Zhao, Chenguang Wang, Huiliang Cao, Chong Shen","doi":"10.3390/mi16091036","DOIUrl":null,"url":null,"abstract":"<p><p>Aiming at the issue of time-varying measurement noise with heavy-tailed characteristics and outliers generated by the polarization compass (PC) in the micro-electro-mechanical system-inertial navigation system (MEMS-INS) and PC-integrated navigation system when it is subject to internal and external disturbances, an improved Variational Bayesian Innovation Saturation Robust Adaptive Kalman filter (VISKF) algorithm is proposed. This algorithm utilizes the variational Bayesian (VB) method based on Student's <i>t</i>-distribution (STD) to approximately calculate the statistical characteristics of the time-varying measurement noise of the PC, thereby obtaining more accurate measurement noise statistical parameters. Additionally, the algorithm introduces an innovation saturation function and proposes an adaptive update strategy for the saturation boundary. It mitigates the problem of innovation value divergence in PC caused by outliers through a two-layer structure that can track the changes in the innovation value to adaptively adjust the saturation boundary. To verify the effectiveness of the algorithm, static and dynamic experiments were conducted on an unmanned vehicle. The experimental results show that compared with adaptive Kalman filter (AKF), variational Bayesian robust adaptive Kalman filter (VBRAKF), and innovation saturate robust adaptive Kalman filter (ISRAKF), the proposed algorithm improves the dynamic orientation accuracy by 76.89%, 67.23%, and 84.45%, respectively. Moreover, compared with other similar target algorithms, the proposed algorithm also has obvious advantages. Therefore, this method can significantly improve the navigation accuracy and robustness of the INS/PC integrated navigation system in complex environments.</p>","PeriodicalId":18508,"journal":{"name":"Micromachines","volume":"16 9","pages":""},"PeriodicalIF":3.0000,"publicationDate":"2025-09-10","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12472092/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Micromachines","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.3390/mi16091036","RegionNum":3,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"CHEMISTRY, ANALYTICAL","Score":null,"Total":0}
引用次数: 0
Abstract
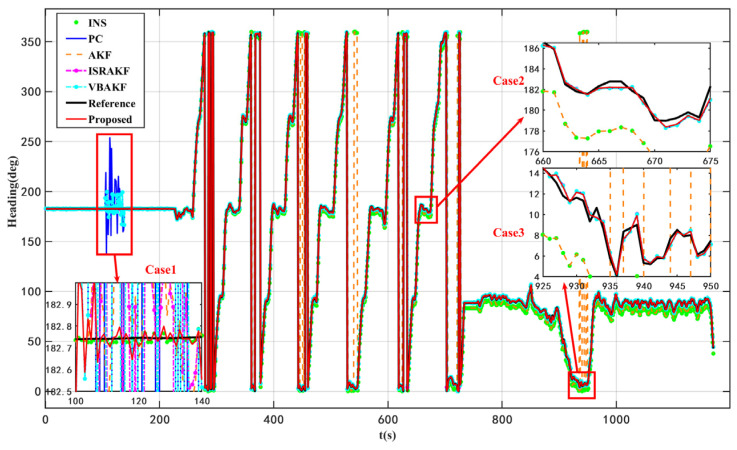
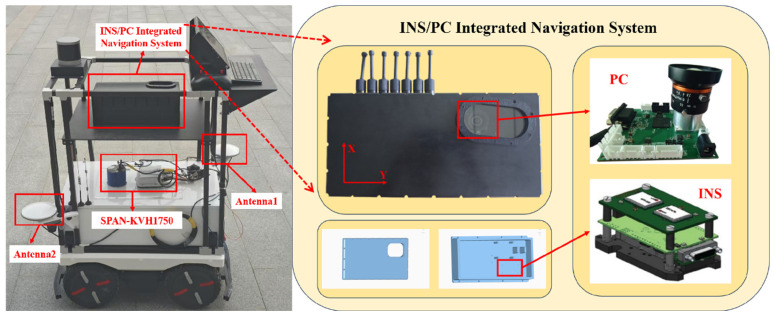
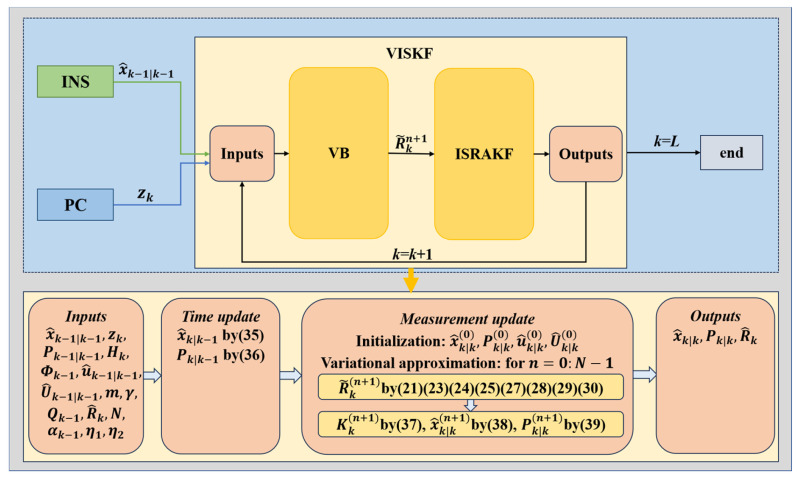
Aiming at the issue of time-varying measurement noise with heavy-tailed characteristics and outliers generated by the polarization compass (PC) in the micro-electro-mechanical system-inertial navigation system (MEMS-INS) and PC-integrated navigation system when it is subject to internal and external disturbances, an improved Variational Bayesian Innovation Saturation Robust Adaptive Kalman filter (VISKF) algorithm is proposed. This algorithm utilizes the variational Bayesian (VB) method based on Student's t-distribution (STD) to approximately calculate the statistical characteristics of the time-varying measurement noise of the PC, thereby obtaining more accurate measurement noise statistical parameters. Additionally, the algorithm introduces an innovation saturation function and proposes an adaptive update strategy for the saturation boundary. It mitigates the problem of innovation value divergence in PC caused by outliers through a two-layer structure that can track the changes in the innovation value to adaptively adjust the saturation boundary. To verify the effectiveness of the algorithm, static and dynamic experiments were conducted on an unmanned vehicle. The experimental results show that compared with adaptive Kalman filter (AKF), variational Bayesian robust adaptive Kalman filter (VBRAKF), and innovation saturate robust adaptive Kalman filter (ISRAKF), the proposed algorithm improves the dynamic orientation accuracy by 76.89%, 67.23%, and 84.45%, respectively. Moreover, compared with other similar target algorithms, the proposed algorithm also has obvious advantages. Therefore, this method can significantly improve the navigation accuracy and robustness of the INS/PC integrated navigation system in complex environments.
期刊介绍:
Micromachines (ISSN 2072-666X) is an international, peer-reviewed open access journal which provides an advanced forum for studies related to micro-scaled machines and micromachinery. It publishes reviews, regular research papers and short communications. Our aim is to encourage scientists to publish their experimental and theoretical results in as much detail as possible. There is no restriction on the length of the papers. The full experimental details must be provided so that the results can be reproduced.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


