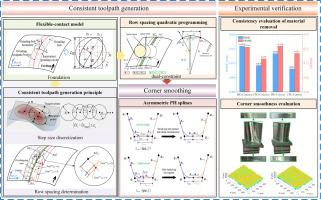
Generation principle of consistent toolpath for precision smoothing curved blades
IF 9.4
1区 工程技术
Q1 ENGINEERING, MECHANICAL
International Journal of Mechanical Sciences
Pub Date : 2025-09-21
DOI:10.1016/j.ijmecsci.2025.110874
引用次数: 0
Abstract
Achieving high-precision and uniform material removal in robotic grinding of blades remains a critical challenge in aerospace manufacturing. A major contributing factor is that existing toolpath planning methods fail to consider the flexible contact characteristics and tangential discontinuities in belt grinding, leading to uneven material removal. To address these challenges, a consistent toolpath generation method with corner smoothing is introduced for robotic belt grinding. First, cutter-contact points are discretized using an optimized constant chord height strategy and adjusted according to contact constraints. Then, the row spacing direction is determined through an iterative search algorithm to ensure uniform overlap between adjacent toolpaths. To further eliminate residual height errors, a dual-constraint interval contraction algorithm is introduced to accurately locate and suppress peak residual height regions on the blade surface. In addition, a Pythagorean-Hodograph (PH) spline-based corner smoothing algorithm is developed to effectively utilize error constraints, thereby improving the robotic feed rate at blade corners. Finally, robotic grinding experiments on turbine blades were conducted to validate the effectiveness of the proposed method. The results showed that consistent toolpath generation (CPG) method outperforms Iso-parametric toolpath generation (IPG) method with improvements of up to 41.67 % in root mean square error (RMSE) and 26.07 % in normalized root mean square error (NRMSE) across blade surfaces. Furthermore, quadratic row spacing planning led to 26.83 % and 30.77 % reductions in blade RMSE and peak-to-valley (PV) across four sections compared to without planning. Additionally, corner smoothing led to reductions of 55.95 % in root mean square (RMS) and 54.99 % in PV waviness errors compared to the unsmoothed surface.
精密光滑曲面叶片一致刀路生成原理
在机器人叶片磨削中实现高精度、均匀的材料去除仍然是航空航天制造中的一个关键挑战。现有的刀具轨迹规划方法没有考虑带磨削的柔性接触特性和切向不连续,导致材料去除不均匀,是造成带磨削不均匀的主要原因。针对这些问题,提出了一种基于角点平滑的机器人带磨削一致性刀路生成方法。首先,采用优化的恒弦高策略对刀具接触点进行离散化,并根据接触约束进行调整。然后,通过迭代搜索算法确定行间距方向,确保相邻刀具路径均匀重叠;为了进一步消除残高误差,引入双约束区间收缩算法对叶片表面残高峰值区域进行精确定位和抑制。此外,为了有效利用误差约束,提出了一种基于毕达哥拉斯- hodograph (PH)样条的圆角平滑算法,从而提高了机器人在叶片圆角处的进给速度。最后,对涡轮叶片进行了机器人磨削实验,验证了该方法的有效性。结果表明,一致性刀具路径生成(CPG)方法优于等参数刀具路径生成(IPG)方法,在叶片表面的均方根误差(RMSE)和标准化均方根误差(NRMSE)上分别提高了41.67%和26.07%。此外,与没有规划相比,二次行距规划导致叶片RMSE和峰谷比(PV)分别降低26.83%和30.77%。此外,与未光滑表面相比,拐角平滑导致均方根误差(RMS)降低55.95%,PV波浪度误差降低54.99%。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

International Journal of Mechanical Sciences
工程技术-工程:机械
CiteScore
12.80
自引率
17.80%
发文量
769
审稿时长
19 days
期刊介绍:
The International Journal of Mechanical Sciences (IJMS) serves as a global platform for the publication and dissemination of original research that contributes to a deeper scientific understanding of the fundamental disciplines within mechanical, civil, and material engineering.
The primary focus of IJMS is to showcase innovative and ground-breaking work that utilizes analytical and computational modeling techniques, such as Finite Element Method (FEM), Boundary Element Method (BEM), and mesh-free methods, among others. These modeling methods are applied to diverse fields including rigid-body mechanics (e.g., dynamics, vibration, stability), structural mechanics, metal forming, advanced materials (e.g., metals, composites, cellular, smart) behavior and applications, impact mechanics, strain localization, and other nonlinear effects (e.g., large deflections, plasticity, fracture).
Additionally, IJMS covers the realms of fluid mechanics (both external and internal flows), tribology, thermodynamics, and materials processing. These subjects collectively form the core of the journal's content.
In summary, IJMS provides a prestigious platform for researchers to present their original contributions, shedding light on analytical and computational modeling methods in various areas of mechanical engineering, as well as exploring the behavior and application of advanced materials, fluid mechanics, thermodynamics, and materials processing.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


