Smooth motion in piezoelectric stick-slip actuators at low driving voltage enabled by an orthogonally coupled symmetric mechanism
IF 3.7
2区 工程技术
Q2 ENGINEERING, MANUFACTURING
Precision Engineering-Journal of the International Societies for Precision Engineering and Nanotechnology
Pub Date : 2025-09-23
DOI:10.1016/j.precisioneng.2025.09.019
引用次数: 0
Abstract
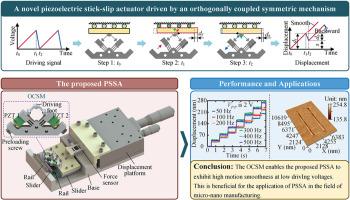
To achieve smooth motion over a wide velocity range in micro-nano manufacturing, this paper presents a novel piezoelectric stick-slip actuator (PSSA) actuated by an orthogonally coupled symmetric mechanism (OCSM). The OCSM comprises two vertically symmetric branches, each branch containing a vertically series-connected III-shaped guiding and i-shaped passive flexible mechanism, enabling efficient transmission of the piezoelectric actuator (PZT) displacement to the driving foot while enhancing end stiffness and first-order natural frequency. The impact of the stiffness of each flexible mechanism on motion smoothness is investigated through theoretical analysis. Key parameters are determined, and finite element analysis is conducted for verification. A prototype of the PSSA has been manufactured, and experimental tests are conducted. The results indicate that the developed PSSA exhibits a compact structure, smooth motion under low driving voltage, high stepping mode resolution (38.5 nm), and rapid velocity (6.21 mm/s). The influence of driving voltage, driving frequency, and the number of pulse cycles per step on motion smoothness is analyzed. A macro-micro switching positioning experiment is conducted. And the scanning mode resolution is 20 nm. Tip-based nanofabrication (TBN) experiments are conducted to create micro-nano structures on silicon wafer surfaces.
采用正交耦合对称机构实现压电贴滑执行器在低驱动电压下的平滑运动
为了在微纳制造中实现大速度范围内的平滑运动,本文提出了一种由正交耦合对称机构(OCSM)驱动的新型压电贴滑致动器(PSSA)。OCSM包括两个垂直对称的分支,每个分支包含一个垂直串联的iii型导向和i型被动柔性机构,能够有效地将压电驱动器(PZT)位移传递到驱动足,同时提高端刚度和一阶固有频率。通过理论分析,研究了各柔性机构的刚度对运动平顺性的影响。确定了关键参数,并进行了有限元分析验证。制造了PSSA的原型,并进行了实验测试。结果表明,所研制的PSSA结构紧凑,在低驱动电压下运动平稳,步进模式分辨率高(38.5 nm),速度快(6.21 mm/s)。分析了驱动电压、驱动频率和每步脉冲周期数对运动平稳性的影响。进行了宏微开关定位实验。扫描模式分辨率为20nm。采用尖端纳米加工(TBN)技术在硅片表面制备微纳结构。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

CiteScore
7.40
自引率
5.60%
发文量
177
审稿时长
46 days
期刊介绍:
Precision Engineering - Journal of the International Societies for Precision Engineering and Nanotechnology is devoted to the multidisciplinary study and practice of high accuracy engineering, metrology, and manufacturing. The journal takes an integrated approach to all subjects related to research, design, manufacture, performance validation, and application of high precision machines, instruments, and components, including fundamental and applied research and development in manufacturing processes, fabrication technology, and advanced measurement science. The scope includes precision-engineered systems and supporting metrology over the full range of length scales, from atom-based nanotechnology and advanced lithographic technology to large-scale systems, including optical and radio telescopes and macrometrology.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


