Marietta Gulz, Marie-Lucile Bodet, Matthias Streich, Anna Habegger, Martin Heubner, Damaris Erhardt, Borjana Bogdanovic, Michael David Mueller
{"title":"Multicenter evaluation of the DEXTER® Robotic Surgery System for Total Hysterectomy with Adnexal Surgery.","authors":"Marietta Gulz, Marie-Lucile Bodet, Matthias Streich, Anna Habegger, Martin Heubner, Damaris Erhardt, Borjana Bogdanovic, Michael David Mueller","doi":"10.1007/s11701-025-02647-0","DOIUrl":null,"url":null,"abstract":"<p><p>Minimally invasive hysterectomy is the preferred surgical approach for benign gynecologic conditions. The DEXTER® Robotic Surgery System was developed to address the limitations of conventional robotic systems, offering a mobile, modular, and accessible alternative adaptable to various surgical environments. This prospective, multicenter, single-arm study evaluated the clinical performance and early postoperative safety of the robotic-assisted hysterectomy with adnexal surgery for benign indications with DEXTER. The primary endpoints were short-term safety, assessed by the occurrence of Clavien-Dindo grade ≥ III adverse events up to 42 days postoperatively, and procedural success without conversion to laparoscopy or open surgery. Fifty-two patients were enrolled across four European centers-one university hospital and three community hospitals. All procedures were successfully completed without intraoperative complications or conversions. The mean total skin-to-skin operative time was 121.9 ± 42.7 min, and the mean estimated blood loss was 87.8 ± 93.8 mL. The system also demonstrated efficient setup with a mean docking time of 3.8 ± 1.3 min, as well as the feasibility of a three-trocar technique for minimal scarring and potential for outpatient application in select cases. The mean time to discharge was 2.0 ± 0.9 days. One major Clavien-Dindo IIIb complication occurred. No device-related adverse events were reported. These results confirm the safety and performance of DEXTER in robotic-assisted hysterectomy and support its role in expanding access to robotic-assisted surgery in diverse clinical settings.Trial registration: ClinicalTrials.gov NCT06473675.</p>","PeriodicalId":47616,"journal":{"name":"Journal of Robotic Surgery","volume":"19 1","pages":"634"},"PeriodicalIF":3.0000,"publicationDate":"2025-09-26","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12464066/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Robotic Surgery","FirstCategoryId":"3","ListUrlMain":"https://doi.org/10.1007/s11701-025-02647-0","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"SURGERY","Score":null,"Total":0}
引用次数: 0
Abstract
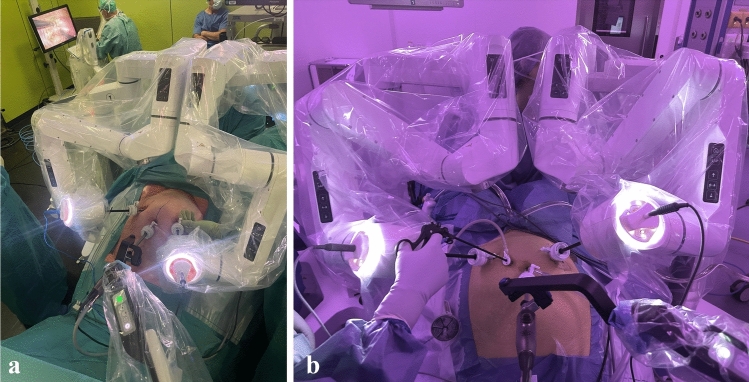
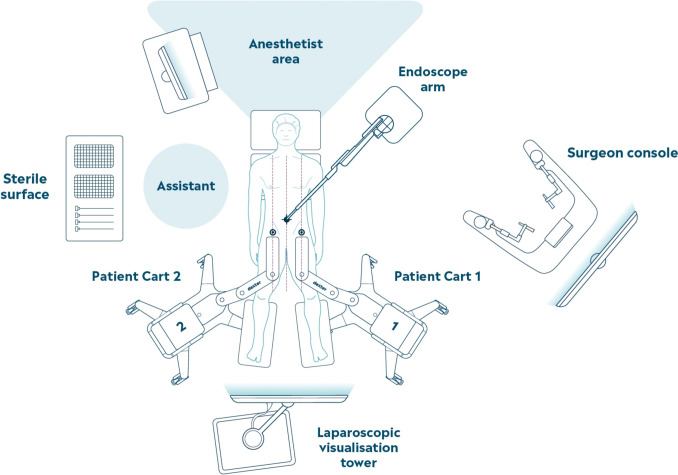
Minimally invasive hysterectomy is the preferred surgical approach for benign gynecologic conditions. The DEXTER® Robotic Surgery System was developed to address the limitations of conventional robotic systems, offering a mobile, modular, and accessible alternative adaptable to various surgical environments. This prospective, multicenter, single-arm study evaluated the clinical performance and early postoperative safety of the robotic-assisted hysterectomy with adnexal surgery for benign indications with DEXTER. The primary endpoints were short-term safety, assessed by the occurrence of Clavien-Dindo grade ≥ III adverse events up to 42 days postoperatively, and procedural success without conversion to laparoscopy or open surgery. Fifty-two patients were enrolled across four European centers-one university hospital and three community hospitals. All procedures were successfully completed without intraoperative complications or conversions. The mean total skin-to-skin operative time was 121.9 ± 42.7 min, and the mean estimated blood loss was 87.8 ± 93.8 mL. The system also demonstrated efficient setup with a mean docking time of 3.8 ± 1.3 min, as well as the feasibility of a three-trocar technique for minimal scarring and potential for outpatient application in select cases. The mean time to discharge was 2.0 ± 0.9 days. One major Clavien-Dindo IIIb complication occurred. No device-related adverse events were reported. These results confirm the safety and performance of DEXTER in robotic-assisted hysterectomy and support its role in expanding access to robotic-assisted surgery in diverse clinical settings.Trial registration: ClinicalTrials.gov NCT06473675.
期刊介绍:
The aim of the Journal of Robotic Surgery is to become the leading worldwide journal for publication of articles related to robotic surgery, encompassing surgical simulation and integrated imaging techniques. The journal provides a centralized, focused resource for physicians wishing to publish their experience or those wishing to avail themselves of the most up-to-date findings.The journal reports on advance in a wide range of surgical specialties including adult and pediatric urology, general surgery, cardiac surgery, gynecology, ENT, orthopedics and neurosurgery.The use of robotics in surgery is broad-based and will undoubtedly expand over the next decade as new technical innovations and techniques increase the applicability of its use. The journal intends to capture this trend as it develops.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


