Kaiyang Yin, Pengchao Hao, Huanli Zhao, Pengyu Lou, Yi Chen
{"title":"High-Accuracy Lower-Limb Intent Recognition: A KPCA-ISSA-SVM Approach with sEMG-IMU Sensor Fusion.","authors":"Kaiyang Yin, Pengchao Hao, Huanli Zhao, Pengyu Lou, Yi Chen","doi":"10.3390/biomimetics10090609","DOIUrl":null,"url":null,"abstract":"<p><p>Accurately decoding human locomotion intention from physiological signals remains a significant hurdle for the seamless control of advanced rehabilitation devices like exoskeletons and intelligent prosthetics. Conventional recognition methods often falter, exhibiting limited accuracy and struggling to capture the complex, nonlinear dynamics inherent in biological data streams. Addressing these critical limitations, this study introduces a novel framework for lower-limb motion intent recognition, integrating Kernel Principal Component Analysis (KPCA) with a Support Vector Machine (SVM) optimized via an Improved Sparrow Search Algorithm (ISSA). Our approach commences by constructing a comprehensive high-dimensional feature space from synchronized surface electromyography (sEMG) and inertial measurement unit (IMU) data-a potent combination reflecting both muscle activation and limb kinematics. Critically, KPCA is employed for nonlinear dimensionality reduction; leveraging the power of kernel functions, it transcends the linear constraints of traditional PCA to extract low-dimensional principal components that retain significantly more discriminative information. Furthermore, the Sparrow Search Algorithm (SSA) undergoes three strategic enhancements: chaotic opposition-based learning for superior population diversity, adaptive dynamic weighting to adeptly balance exploration and exploitation, and hybrid mutation strategies to effectively mitigate premature convergence. This enhanced ISSA meticulously optimizes the SVM hyperparameters, ensuring robust classification performance. Experimental validation, conducted on a challenging 13-class lower-limb motion dataset, compellingly demonstrates the superiority of the proposed KPCA-ISSA-SVM architecture. It achieves a remarkable recognition accuracy of 95.35% offline and 93.3% online, substantially outperforming conventional PCA-SVM (91.85%) and standalone SVM (89.76%) benchmarks. This work provides a robust and significantly more accurate solution for intention perception in human-machine systems, paving the way for more intuitive and effective rehabilitation technologies by adeptly handling the nonlinear coupling characteristics of sEMG-IMU data and complex motion patterns.</p>","PeriodicalId":8907,"journal":{"name":"Biomimetics","volume":"10 9","pages":""},"PeriodicalIF":3.9000,"publicationDate":"2025-09-10","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12467861/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Biomimetics","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.3390/biomimetics10090609","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
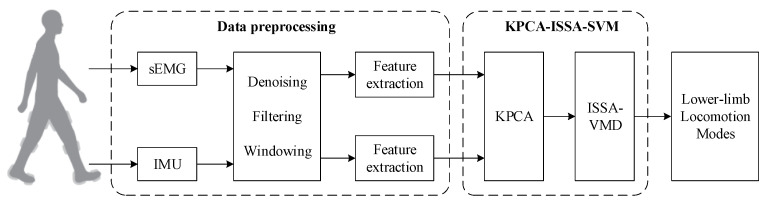
Accurately decoding human locomotion intention from physiological signals remains a significant hurdle for the seamless control of advanced rehabilitation devices like exoskeletons and intelligent prosthetics. Conventional recognition methods often falter, exhibiting limited accuracy and struggling to capture the complex, nonlinear dynamics inherent in biological data streams. Addressing these critical limitations, this study introduces a novel framework for lower-limb motion intent recognition, integrating Kernel Principal Component Analysis (KPCA) with a Support Vector Machine (SVM) optimized via an Improved Sparrow Search Algorithm (ISSA). Our approach commences by constructing a comprehensive high-dimensional feature space from synchronized surface electromyography (sEMG) and inertial measurement unit (IMU) data-a potent combination reflecting both muscle activation and limb kinematics. Critically, KPCA is employed for nonlinear dimensionality reduction; leveraging the power of kernel functions, it transcends the linear constraints of traditional PCA to extract low-dimensional principal components that retain significantly more discriminative information. Furthermore, the Sparrow Search Algorithm (SSA) undergoes three strategic enhancements: chaotic opposition-based learning for superior population diversity, adaptive dynamic weighting to adeptly balance exploration and exploitation, and hybrid mutation strategies to effectively mitigate premature convergence. This enhanced ISSA meticulously optimizes the SVM hyperparameters, ensuring robust classification performance. Experimental validation, conducted on a challenging 13-class lower-limb motion dataset, compellingly demonstrates the superiority of the proposed KPCA-ISSA-SVM architecture. It achieves a remarkable recognition accuracy of 95.35% offline and 93.3% online, substantially outperforming conventional PCA-SVM (91.85%) and standalone SVM (89.76%) benchmarks. This work provides a robust and significantly more accurate solution for intention perception in human-machine systems, paving the way for more intuitive and effective rehabilitation technologies by adeptly handling the nonlinear coupling characteristics of sEMG-IMU data and complex motion patterns.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


