{"title":"Self-Supervised Voice Denoising Network for Multi-Scenario Human-Robot Interaction.","authors":"Mu Li, Wenjin Xu, Chao Zeng, Ning Wang","doi":"10.3390/biomimetics10090603","DOIUrl":null,"url":null,"abstract":"<p><p>Human-robot interaction (HRI) via voice command has significantly advanced in recent years, with large Vision-Language-Action (VLA) models demonstrating particular promise in human-robot voice interaction. However, these systems still struggle with environmental noise contamination during voice interaction and lack a specialized denoising network for multi-speaker command isolation in an overlapping speech scenario. To overcome these challenges, we introduce a method to enhance voice command-based HRI in noisy environments, leveraging synthetic data and a self-supervised denoising network to enhance its real-world applicability. Our approach focuses on improving self-supervised network performance in denoising mixed-noise audio through training data scaling. Extensive experiments show our method outperforms existing approaches in simulation and achieves 7.5% higher accuracy than the state-of-the-art method in noisy real-world environments, enhancing voice-guided robot control.</p>","PeriodicalId":8907,"journal":{"name":"Biomimetics","volume":"10 9","pages":""},"PeriodicalIF":3.9000,"publicationDate":"2025-09-09","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12467738/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Biomimetics","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.3390/biomimetics10090603","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
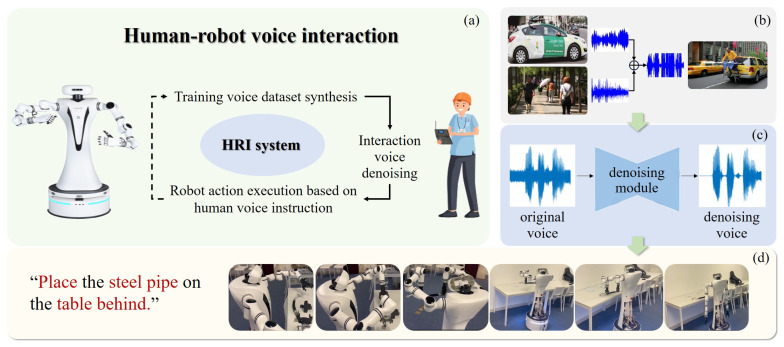
Human-robot interaction (HRI) via voice command has significantly advanced in recent years, with large Vision-Language-Action (VLA) models demonstrating particular promise in human-robot voice interaction. However, these systems still struggle with environmental noise contamination during voice interaction and lack a specialized denoising network for multi-speaker command isolation in an overlapping speech scenario. To overcome these challenges, we introduce a method to enhance voice command-based HRI in noisy environments, leveraging synthetic data and a self-supervised denoising network to enhance its real-world applicability. Our approach focuses on improving self-supervised network performance in denoising mixed-noise audio through training data scaling. Extensive experiments show our method outperforms existing approaches in simulation and achieves 7.5% higher accuracy than the state-of-the-art method in noisy real-world environments, enhancing voice-guided robot control.


 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


