Robust sliding mode control of vibration in thin-walled milling
IF 9.4
1区 工程技术
Q1 ENGINEERING, MECHANICAL
International Journal of Mechanical Sciences
Pub Date : 2025-09-16
DOI:10.1016/j.ijmecsci.2025.110843
引用次数: 0
Abstract
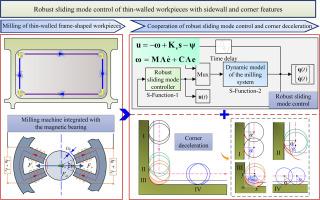
The existing research on the active control of milling vibration primarily focuses on thin-walled plates with simple boundaries. In this paper, the vibration suppression of frame-shaped thin-walled workpieces with sidewall and corner features is studied. Firstly, the kinematics and dynamic models are established to analyze the milling characteristics of sidewalls and corners, respectively. After that, a vibration suppression method combining corner deceleration and active control is presented. The robust controller is designed based on the Hamilton-Jacobi inequality and Lyapunov stability theory. To implement active control, a milling machine integrated with the electromagnetic actuator is developed. The compact structure based on the magnetic bearing is more feasible and convenient for tool-changing operations. The main contribution and performance of the theoretical methods are presented as follows: (I) The workpiece studied in this paper is closer to real thin-walled parts in engineering; (II) The designed controller exhibits good robustness under the changes in the depth of cut and system disturbance; (III) Based on simulation and experimental results, the milling stability is improved effectively and the vibration amplitudes decrease to an average level of more than 23.4%. Referring to the theoretical critical depth of cut based on the stability lobe diagram, the machining efficiency under the control method presented in this paper can be increased by 108%.
薄壁铣削振动的鲁棒滑模控制
现有的铣削振动主动控制研究主要集中在边界简单的薄壁板上。本文对具有边角特征的框架型薄壁件的振动抑制进行了研究。首先,建立了铣削的运动学和动力学模型,分别分析了侧壁和角的铣削特性。在此基础上,提出了一种弯道减速与主动控制相结合的减振方法。基于Hamilton-Jacobi不等式和Lyapunov稳定性理论设计了鲁棒控制器。为实现主动控制,研制了一种集成电磁作动器的铣床。基于磁轴承的紧凑结构使换刀操作更加可行和方便。理论方法的主要贡献和性能表现为:(1)本文研究的工件更接近实际工程薄壁件;(2)所设计的控制器在切深变化和系统扰动下都具有良好的鲁棒性;(三)仿真和实验结果表明,铣削稳定性得到有效提高,振动幅值平均减小到23.4%以上。参考基于稳定性叶瓣图的理论临界切削深度,在本文提出的控制方法下,加工效率可提高108%。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

International Journal of Mechanical Sciences
工程技术-工程:机械
CiteScore
12.80
自引率
17.80%
发文量
769
审稿时长
19 days
期刊介绍:
The International Journal of Mechanical Sciences (IJMS) serves as a global platform for the publication and dissemination of original research that contributes to a deeper scientific understanding of the fundamental disciplines within mechanical, civil, and material engineering.
The primary focus of IJMS is to showcase innovative and ground-breaking work that utilizes analytical and computational modeling techniques, such as Finite Element Method (FEM), Boundary Element Method (BEM), and mesh-free methods, among others. These modeling methods are applied to diverse fields including rigid-body mechanics (e.g., dynamics, vibration, stability), structural mechanics, metal forming, advanced materials (e.g., metals, composites, cellular, smart) behavior and applications, impact mechanics, strain localization, and other nonlinear effects (e.g., large deflections, plasticity, fracture).
Additionally, IJMS covers the realms of fluid mechanics (both external and internal flows), tribology, thermodynamics, and materials processing. These subjects collectively form the core of the journal's content.
In summary, IJMS provides a prestigious platform for researchers to present their original contributions, shedding light on analytical and computational modeling methods in various areas of mechanical engineering, as well as exploring the behavior and application of advanced materials, fluid mechanics, thermodynamics, and materials processing.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


