Sensor placement strategy and evaluation for underwater active electrosense arrays
IF 8.9
1区 工程技术
Q1 ENGINEERING, MECHANICAL
引用次数: 0
Abstract
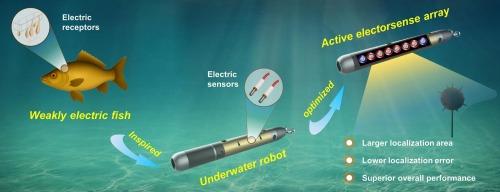
The active electrosense mechanism of weakly electric fish provides a novel approach for underwater robot localization and navigation. However, unsuitable sensor placement can easily lead to data redundancy or the loss of crucial information. Herein, we proposed a novel sensor placement strategy for localizing interested-region targets with active electrosense arrays. This paper formulates an optimization problem for sensor placement based on the array signal model and Cramer-Rao lower bound (CRLB). To solve such a nonlinear and nonconvex problem, an enhanced grey wolf optimizer (EGWO) with dynamic weight and segment search mechanisms is developed. Two indexes, relative Euclidean error and effective localization area, are introduced to evaluate the array performance. The results in both simulation and experiment demonstrate the effectiveness of the proposed sensor placement strategy, as well as its superiority over uniform placement. The proposed sensor placement strategy can be used to design active electrosense systems on bionic robotic fish and other underwater vehicles.
水下有源电感测阵列传感器布置策略与评价
弱电鱼的主动电感机制为水下机器人定位和导航提供了一种新的途径。然而,不合适的传感器位置很容易导致数据冗余或关键信息的丢失。在此,我们提出了一种新的传感器放置策略,用于定位有源电感测阵列感兴趣的区域目标。本文提出了基于阵列信号模型和Cramer-Rao下界(CRLB)的传感器布局优化问题。为了解决这一非线性非凸问题,提出了一种具有动态权值和段搜索机制的增强型灰狼优化器。引入相对欧几里得误差和有效定位面积两个指标来评价阵列的性能。仿真和实验结果均证明了所提出的传感器放置策略的有效性,以及其相对于均匀放置的优越性。所提出的传感器放置策略可用于仿生机器鱼和其他水下航行器的主动电传感系统设计。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Mechanical Systems and Signal Processing
工程技术-工程:机械
CiteScore
14.80
自引率
13.10%
发文量
1183
审稿时长
5.4 months
期刊介绍:
Journal Name: Mechanical Systems and Signal Processing (MSSP)
Interdisciplinary Focus:
Mechanical, Aerospace, and Civil Engineering
Purpose:Reporting scientific advancements of the highest quality
Arising from new techniques in sensing, instrumentation, signal processing, modelling, and control of dynamic systems
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


