Neighborhood-perturbed and nonlinearly enhanced whale optimization for high-precision trajectory tracking and stability control in four-steering-wheel AGVs
IF 5
2区 工程技术
Q1 ENGINEERING, ELECTRICAL & ELECTRONIC
International Journal of Electrical Power & Energy Systems
Pub Date : 2025-09-11
DOI:10.1016/j.ijepes.2025.111048
引用次数: 0
Abstract
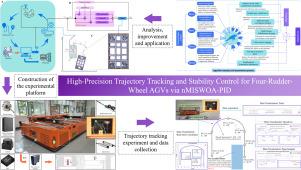
This study proposes an integrated control strategy combining a nonlinear multi-swarm improved spiral whale optimization algorithm (nMISWOA) with PID control to enhance trajectory tracking and stability for heavy-duty four-steering-wheel AGVs in complex industrial environments. First, significant enhancements were introduced to the conventional whale optimization algorithm through the incorporation of cubic chaotic mapping, adaptive random factors, and neighborhood perturbation mechanisms, effectively improving initial population diversity, exploration–exploitation balance, and local convergence performance. Second, a dual-layer optimization control architecture based on nMISWOA-PID was constructed in conjunction with an enhanced nonlinear dynamic model of four-steering-wheel AGVs. This framework enables adaptive parameter tuning and dynamic compensation for the controller. Simulations on CEC 2022 benchmarks show nMISWOA outperforms five peers (WOA, GGO, GWO, MFO, SSA) in convergence accuracy, variance, and optimal solutions, particularly in 20-dimensional problems. The nMISWOA-PID controller reduced overshoot by over 30% in step response tests compared to other algorithm-based controllers. Physical experiments demonstrated over 20% lower tracking error and 12.87% higher positioning accuracy versus industry standards. The proposed strategy provides theoretical and practical foundations for deploying high-load AGVs in complex scenarios.
基于邻域摄动和非线性增强鲸鱼优化的四方向盘agv高精度轨迹跟踪与稳定性控制
本文提出了一种将非线性多群改进螺旋鲸优化算法(nMISWOA)与PID控制相结合的综合控制策略,以提高重型四方向盘agv在复杂工业环境下的轨迹跟踪能力和稳定性。首先,通过引入三次混沌映射、自适应随机因子和邻域摄动机制,对传统的鲸鱼优化算法进行了显著改进,有效提高了初始种群多样性、勘探开发平衡和局部收敛性能。其次,结合改进的四转向agv非线性动力学模型,构建了基于nMISWOA-PID的双层优化控制体系;该框架可实现自适应参数整定和控制器的动态补偿。在CEC 2022基准测试上的模拟表明,nMISWOA在收敛精度、方差和最优解方面优于五个同类(WOA、GGO、GWO、MFO、SSA),特别是在20维问题上。与其他基于算法的控制器相比,nMISWOA-PID控制器在阶跃响应测试中减少了超过30%的超调。物理实验表明,与行业标准相比,跟踪误差降低20%以上,定位精度提高12.87%。该策略为在复杂场景下部署高负载agv提供了理论和实践基础。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊
CiteScore
12.10
自引率
17.30%
发文量
1022
审稿时长
51 days
期刊介绍:
The journal covers theoretical developments in electrical power and energy systems and their applications. The coverage embraces: generation and network planning; reliability; long and short term operation; expert systems; neural networks; object oriented systems; system control centres; database and information systems; stock and parameter estimation; system security and adequacy; network theory, modelling and computation; small and large system dynamics; dynamic model identification; on-line control including load and switching control; protection; distribution systems; energy economics; impact of non-conventional systems; and man-machine interfaces.
As well as original research papers, the journal publishes short contributions, book reviews and conference reports. All papers are peer-reviewed by at least two referees.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


