Power-constrained networked process control system design
IF 2.5
3区 计算机科学
Q3 AUTOMATION & CONTROL SYSTEMS
引用次数: 0
Abstract
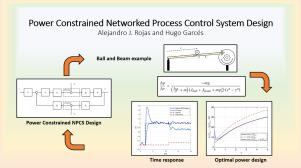
Networked control systems (NCSs) operate at the interface between the physical world and cyberspace enabling the realization of emergent cyber–physical systems that can be controlled over long distance, potentially even from the cloud, thereby reducing the complexity associated with wired solutions. Networked process control systems (NPCSs), as proposed herein, incorporate the challenges inherent in NCS design within the context of process control (the application of automatic control theory). For this purpose, the essential components of an NPCS are considered to be: on the process side, the presence of dominant unstable dynamics, modeled by a first-order (or at most a second-order) transfer function; and on the network side, the presence of additive white noise (AWN) channels on both over the control and feedback paths. The contribution of this work lies in the development of new optimal designs for the stabilization of a first-order unstable NPCS that minimize the associated channel power constraints, thereby mitigating signal distortion, and preserving battery life in cases where the transmitters are not connected to an external power supply. The NPCS optimal controller configures the closed loop dynamics to exhibit a repeated stable pole, while simultaneously minimizing one of the following objectives: the input power of the AWN channel over the control path; the input power of the AWN channel over the feedback path; or the sum of the input powers of both AWN channels, all under a constant reference signal. To illustrate the theoretical developments, a first-principles-based linearized ball and beam model is derived, demonstrating the effectiveness of the proposed NPCS optimal controller designs, and their properties, in comparison to those of a classical proportional-integral (PI) design. The contributions presented in this work are readily extendable to any arbitrary linear plant model possessing a single unstable pole.
功率约束网络化过程控制系统设计
网络控制系统(NCSs)在物理世界和网络空间之间的接口上运行,实现了可以远程控制的紧急网络物理系统,甚至可能从云端进行控制,从而降低了与有线解决方案相关的复杂性。本文提出的网络化过程控制系统(npcs)在过程控制(自动控制理论的应用)的背景下结合了NCS设计固有的挑战。为此目的,npc的基本组成部分被认为是:在过程方面,主要不稳定动力学的存在,由一阶(或最多二阶)传递函数建模;在网络方面,在控制和反馈路径上都存在加性白噪声(AWN)通道。这项工作的贡献在于开发了新的优化设计,用于稳定一阶不稳定的npc,最大限度地减少相关的信道功率限制,从而减轻信号失真,并在发射机未连接到外部电源的情况下保持电池寿命。NPCS最优控制器配置闭环动力学以显示重复的稳定极点,同时最小化以下目标之一:AWN通道在控制路径上的输入功率;AWN通道在反馈路径上的输入功率;或两个AWN通道的输入功率之和,都在恒定的参考信号下。为了说明理论发展,推导了基于第一性原理的线性化球和梁模型,证明了所提出的npc最优控制器设计的有效性,以及与经典比例积分(PI)设计相比的特性。在这项工作中提出的贡献很容易扩展到任何具有单个不稳定极点的任意线性植物模型。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Systems & Control Letters
工程技术-运筹学与管理科学
CiteScore
4.60
自引率
3.80%
发文量
144
审稿时长
6 months
期刊介绍:
Founded in 1981 by two of the pre-eminent control theorists, Roger Brockett and Jan Willems, Systems & Control Letters is one of the leading journals in the field of control theory. The aim of the journal is to allow dissemination of relatively concise but highly original contributions whose high initial quality enables a relatively rapid review process. All aspects of the fields of systems and control are covered, especially mathematically-oriented and theoretical papers that have a clear relevance to engineering, physical and biological sciences, and even economics. Application-oriented papers with sophisticated and rigorous mathematical elements are also welcome.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


