IRIS: An information path planning method based on reinforcement learning and information-directed sampling
IF 7.6
1区 计算机科学
Q1 COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE
引用次数: 0
Abstract
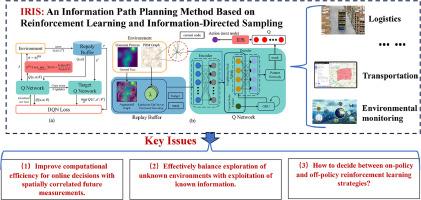
Information Path Planning (IPP) is a critical aspect of robotics, aimed at intelligently selecting information-rich paths to optimize robot trajectories and significantly enhance the efficiency and quality of data collection. However, in the process of maximizing information acquisition, IPP must also account for energy consumption, time constraints, and physical obstacles, which often lead to inefficiencies. To address these challenges, we propose an Information Path Planning method based on Reinforcement Learning and Information-Directed Sampling (IRIS). This model is the first to integrate Reinforcement Learning (RL) with Information-Directed Sampling (IDS), ensuring both immediate rewards and the potential for greater information gain through exploratory actions. IRIS employs an off-policy deep reinforcement learning framework, effectively overcoming the limitations observed in on-policy methods, thereby enhancing the model’s adaptability and efficiency. Simulation results demonstrate that the IRIS algorithm performs exceptionally well across various IPP scenarios. Once training stabilizes, IDS will dominate decision-making with a probability of approximately 1.3 % to yield better outcomes, highlighting its significant potential in this field. The relevant code is available at https://github.com/SUTLZY/IRIS.
IRIS:一种基于强化学习和信息导向采样的信息路径规划方法
信息路径规划(IPP)是机器人技术的一个重要方面,它旨在智能地选择信息丰富的路径来优化机器人轨迹,显著提高数据收集的效率和质量。然而,在最大限度地获取信息的过程中,IPP还必须考虑到能源消耗、时间限制和物理障碍,这些因素往往导致效率低下。为了解决这些挑战,我们提出了一种基于强化学习和信息导向采样(IRIS)的信息路径规划方法。该模型是第一个将强化学习(RL)与信息导向采样(IDS)集成在一起的模型,确保了即时奖励和通过探索性行动获得更大信息的潜力。IRIS采用了非策略深度强化学习框架,有效克服了非策略方法的局限性,从而提高了模型的适应性和效率。仿真结果表明,IRIS算法在各种IPP场景下都具有优异的性能。一旦训练稳定下来,IDS将以大约1.3%的概率主导决策,产生更好的结果,突出了它在这一领域的巨大潜力。相关代码可在https://github.com/SUTLZY/IRIS上获得。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Pattern Recognition
工程技术-工程:电子与电气
CiteScore
14.40
自引率
16.20%
发文量
683
审稿时长
5.6 months
期刊介绍:
The field of Pattern Recognition is both mature and rapidly evolving, playing a crucial role in various related fields such as computer vision, image processing, text analysis, and neural networks. It closely intersects with machine learning and is being applied in emerging areas like biometrics, bioinformatics, multimedia data analysis, and data science. The journal Pattern Recognition, established half a century ago during the early days of computer science, has since grown significantly in scope and influence.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


