{"title":"A unified account of current-future control and affordance-based control for running to catch fly balls.","authors":"Dees B W Postma, Frank T J M Zaal","doi":"10.1167/jov.25.11.9","DOIUrl":null,"url":null,"abstract":"<p><p>Current-future control and affordance-based control offer two distinct approaches to understanding the visual guidance of action. Current-future control strategies, such as the optical acceleration cancellation strategy, are essentially error-nulling strategies. That is, the visual guidance of action is predicated on nulling the error around the critical value of some optical invariant. Whether error nulling is (still) possible, given the action capabilities of the agent, is not specified in current-future control strategies. There is no specification of affordances. Affordance-based control resolves this issue by incorporating action capabilities into the control of action. Although promising, affordance-based control strategies have been criticized for their lack of specific predictions for the control of movement. Affordance-based control strategies are under-constrained in the sense that there is no specific control law that guides action within the space of possibilities. In this contribution, we resolve this issue by showing that current-future control and affordance-based control need not be fundamentally different and that their guiding principles can in fact be reconciled. We propose a new control strategy within the fly-ball paradigm and show its effectiveness through simulations. We show that our model makes clear predictions about the control of interceptive behavior while also informing the fielder about the catchability of fly balls.</p>","PeriodicalId":49955,"journal":{"name":"Journal of Vision","volume":"25 11","pages":"9"},"PeriodicalIF":2.3000,"publicationDate":"2025-09-02","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12448125/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Vision","FirstCategoryId":"3","ListUrlMain":"https://doi.org/10.1167/jov.25.11.9","RegionNum":4,"RegionCategory":"心理学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"OPHTHALMOLOGY","Score":null,"Total":0}
引用次数: 0
Abstract
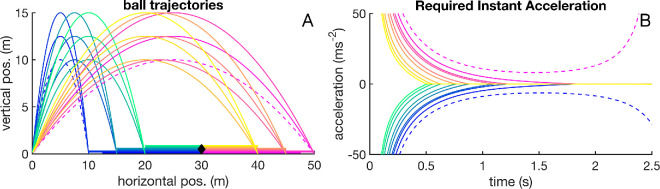
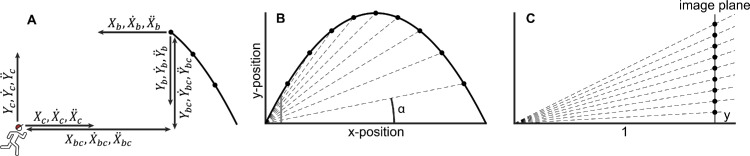
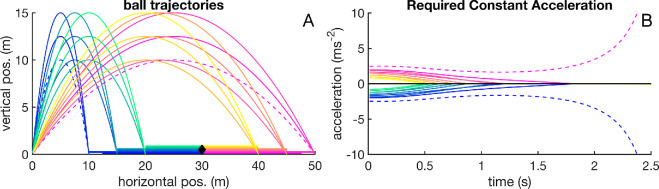
Current-future control and affordance-based control offer two distinct approaches to understanding the visual guidance of action. Current-future control strategies, such as the optical acceleration cancellation strategy, are essentially error-nulling strategies. That is, the visual guidance of action is predicated on nulling the error around the critical value of some optical invariant. Whether error nulling is (still) possible, given the action capabilities of the agent, is not specified in current-future control strategies. There is no specification of affordances. Affordance-based control resolves this issue by incorporating action capabilities into the control of action. Although promising, affordance-based control strategies have been criticized for their lack of specific predictions for the control of movement. Affordance-based control strategies are under-constrained in the sense that there is no specific control law that guides action within the space of possibilities. In this contribution, we resolve this issue by showing that current-future control and affordance-based control need not be fundamentally different and that their guiding principles can in fact be reconciled. We propose a new control strategy within the fly-ball paradigm and show its effectiveness through simulations. We show that our model makes clear predictions about the control of interceptive behavior while also informing the fielder about the catchability of fly balls.
期刊介绍:
Exploring all aspects of biological visual function, including spatial vision, perception,
low vision, color vision and more, spanning the fields of neuroscience, psychology and psychophysics.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


