FIT-SLAM 2: Efficient 3D exploration with Fisher information and traversability-based adaptive roadmap
IF 5.2
2区 计算机科学
Q1 AUTOMATION & CONTROL SYSTEMS
引用次数: 0
Abstract
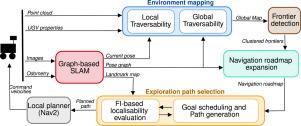
This paper presents FIT-SLAM 2, an enhanced framework for autonomous 3D exploration, integrating Fisher Information and a traversability-aware adaptive roadmap. Building on FIT-SLAM, our approach introduces frontier classification into local and global categories, a scheduling strategy for exploration path computation, and optimized real-time Fisher Information computation using pre-computed lookup tables to assess localization confidence and ensure safe exploration. FIT-SLAM 2 seamlessly integrates with the SLAM backend while iteratively constructing and updating an adaptive roadmap that optimizes both navigation efficiency and safety. This enables the robot to efficiently explore complex environments – including rocky terrains, caves, and mazes – while maintaining robust localization. Extensive experiments demonstrate that FIT-SLAM 2 achieves a 33% increase in exploration rate in unstructured environments along with a notable improvement in localization accuracy and computational efficiency over state-of-the-art methods. For reproducibility and future enhancements, we release our implementation at https://github.com/suchetanrs/FIT-SLAM.
FIT-SLAM 2:利用Fisher信息和基于可穿越性的自适应路线图进行高效3D勘探
本文介绍了FIT-SLAM 2,这是一个用于自主3D探索的增强框架,集成了Fisher信息和可穿越性感知的自适应路线图。在FIT-SLAM的基础上,我们的方法引入了局部和全局类别的前沿分类,勘探路径计算的调度策略,并使用预先计算的查找表优化了实时Fisher信息计算,以评估定位置信度并确保安全勘探。FIT-SLAM 2与SLAM后端无缝集成,同时迭代构建和更新自适应路线图,优化导航效率和安全性。这使得机器人能够有效地探索复杂的环境,包括岩石地形、洞穴和迷宫,同时保持强大的定位。大量实验表明,与最先进的方法相比,FIT-SLAM 2在非结构化环境中的勘探率提高了33%,定位精度和计算效率也有了显著提高。为了再现性和将来的增强,我们在https://github.com/suchetanrs/FIT-SLAM上发布了我们的实现。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Robotics and Autonomous Systems
工程技术-机器人学
CiteScore
9.00
自引率
7.00%
发文量
164
审稿时长
4.5 months
期刊介绍:
Robotics and Autonomous Systems will carry articles describing fundamental developments in the field of robotics, with special emphasis on autonomous systems. An important goal of this journal is to extend the state of the art in both symbolic and sensory based robot control and learning in the context of autonomous systems.
Robotics and Autonomous Systems will carry articles on the theoretical, computational and experimental aspects of autonomous systems, or modules of such systems.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


