{"title":"Reducing applied force in colonoscopy using a novel soft robotic colonoscope: Head-to-head study.","authors":"Jabed Foyez Ahmed, Korn Borvorntanajanya, Jialei Shi, Enrico Franco, Ara Darzi, Ferdinando Rodriguez Baena, Nisha Patel","doi":"10.1055/a-2641-5827","DOIUrl":null,"url":null,"abstract":"<p><strong>Background and study aims: </strong>Current colonoscopies have a recognized limitation. Manual pushing and pulling required by operators provides gross movement in the bowel. Reported pain, therefore, is likely due to the manual force applied. Implementing novel steering techniques with a soft growing robotic system can potentially overcome challenges such as fine control, precise steering, and capability to expand treatment options for complex therapies. This study assessed a novel controlled-growing soft robot compared with a standard colonoscope in terms of force exhibited on a model bowel wall and its clinical implications.</p><p><strong>Methods: </strong>A head-to-head study using a hybrid colon phantom of the left colon was undertaken. Both the novel soft-robot and standard colonoscope were passed through the phantom by endoscopists. Multiple passes were undertaken in the phantom with both colonoscopy methods with force values recorded at two points (rectum and sigmoid) with pressure sensors.</p><p><strong>Results: </strong>Nine clinical endoscopists (4M:5F, 5 non-expert, 4 expert) were recruited. Average force with the novel robot was 0.25N (rectum) and 0.19N (sigmoid). Average force applied with standard colonoscopy was 2.82N (rectum) and 1.45N (sigmoid).</p><p><strong>Conclusions: </strong>This study demonstrated an improvement in force with the novel soft robot compared with a standard colonoscope. This suggests the possibility of more comfortable colonoscopy for patients. Currently time taken is longer with the novel robot, which is attributable to the learning curve and improves in subsequent passes. Further work will be undertaken in a complete colon model with aspirations to reach in-vivo experiments.</p>","PeriodicalId":11671,"journal":{"name":"Endoscopy International Open","volume":"13 ","pages":"a26415827"},"PeriodicalIF":2.3000,"publicationDate":"2025-07-24","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12372447/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Endoscopy International Open","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1055/a-2641-5827","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"GASTROENTEROLOGY & HEPATOLOGY","Score":null,"Total":0}
引用次数: 0
Abstract
Background and study aims: Current colonoscopies have a recognized limitation. Manual pushing and pulling required by operators provides gross movement in the bowel. Reported pain, therefore, is likely due to the manual force applied. Implementing novel steering techniques with a soft growing robotic system can potentially overcome challenges such as fine control, precise steering, and capability to expand treatment options for complex therapies. This study assessed a novel controlled-growing soft robot compared with a standard colonoscope in terms of force exhibited on a model bowel wall and its clinical implications.
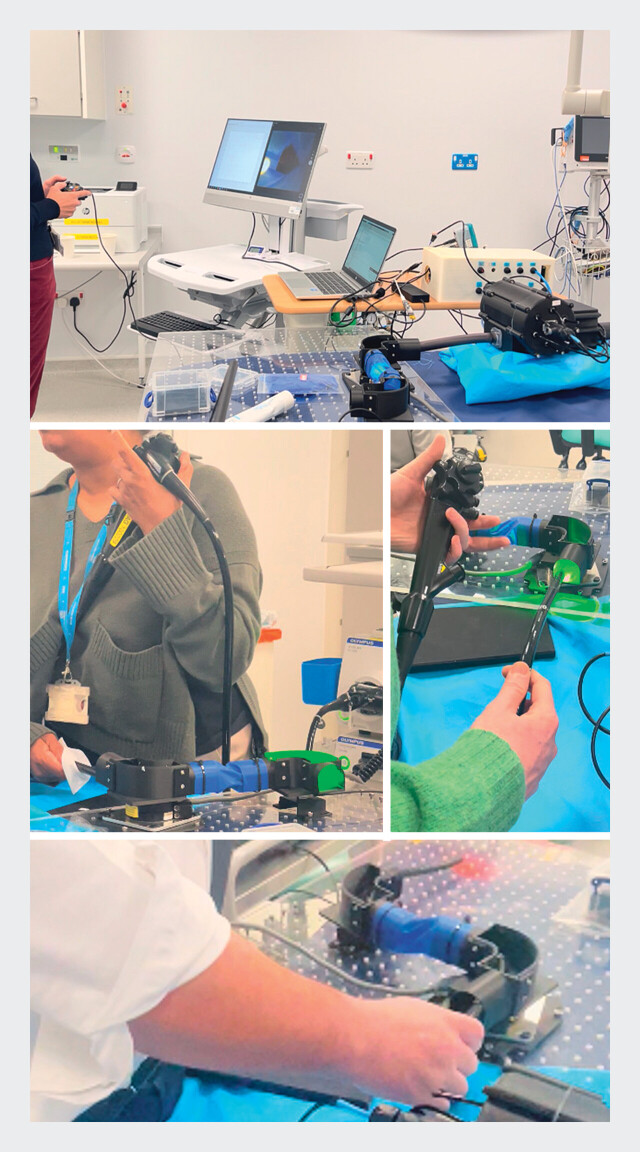
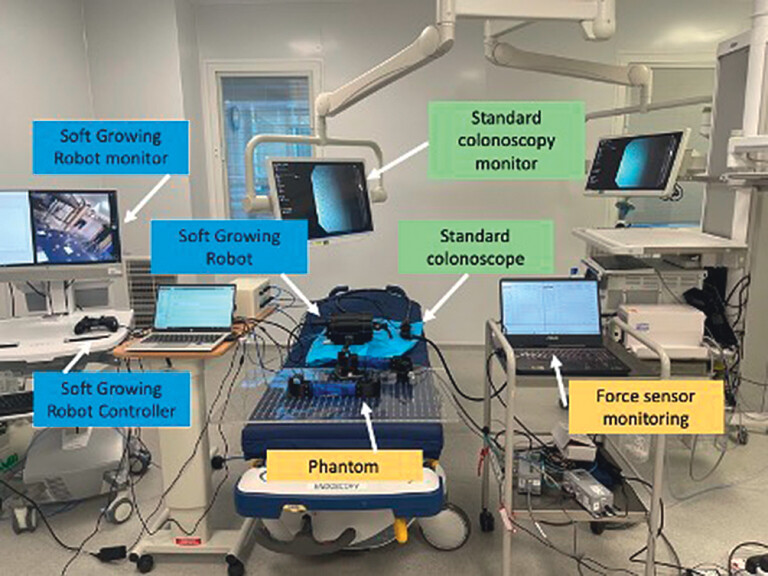
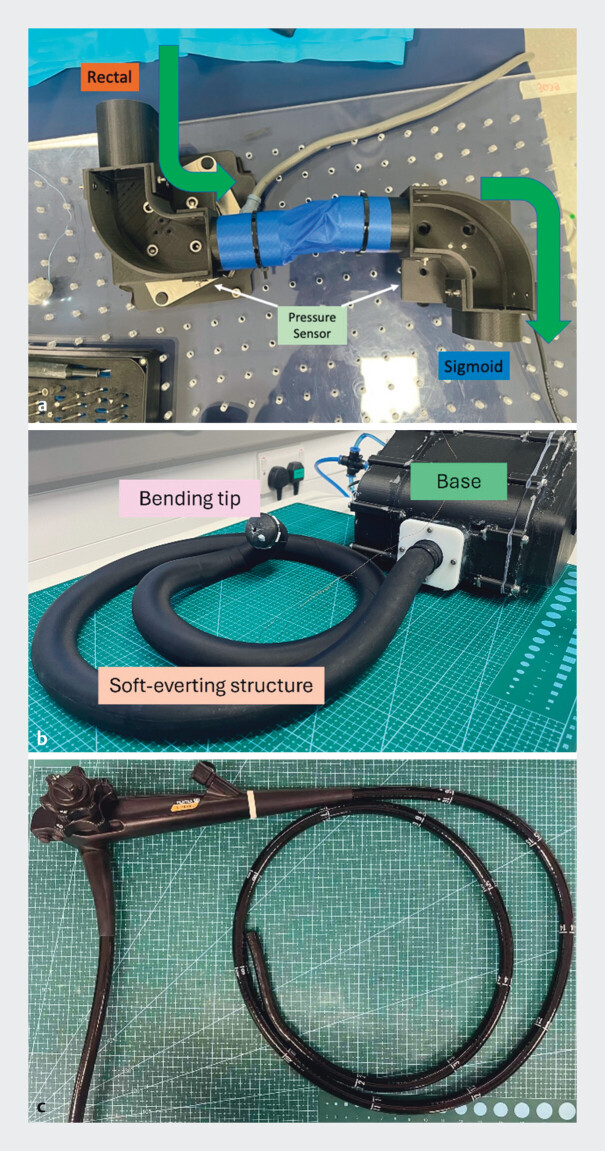
Methods: A head-to-head study using a hybrid colon phantom of the left colon was undertaken. Both the novel soft-robot and standard colonoscope were passed through the phantom by endoscopists. Multiple passes were undertaken in the phantom with both colonoscopy methods with force values recorded at two points (rectum and sigmoid) with pressure sensors.
Results: Nine clinical endoscopists (4M:5F, 5 non-expert, 4 expert) were recruited. Average force with the novel robot was 0.25N (rectum) and 0.19N (sigmoid). Average force applied with standard colonoscopy was 2.82N (rectum) and 1.45N (sigmoid).
Conclusions: This study demonstrated an improvement in force with the novel soft robot compared with a standard colonoscope. This suggests the possibility of more comfortable colonoscopy for patients. Currently time taken is longer with the novel robot, which is attributable to the learning curve and improves in subsequent passes. Further work will be undertaken in a complete colon model with aspirations to reach in-vivo experiments.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


