Muyao Tan, Jun Huang, Xingqiang Jiang, Yilin Fang, Quan Liu, Duc Pham
{"title":"Robotic Removal and Collection of Screws in Collaborative Disassembly of End-of-Life Electric Vehicle Batteries.","authors":"Muyao Tan, Jun Huang, Xingqiang Jiang, Yilin Fang, Quan Liu, Duc Pham","doi":"10.3390/biomimetics10080553","DOIUrl":null,"url":null,"abstract":"<p><p>The recycling and remanufacturing of end-of-life (EoL) electric vehicle (EV) batteries are urgent challenges for a circular economy. Disassembly is crucial for handling EoL EV batteries due to their inherent uncertainties and instability. The human-robot collaborative disassembly of EV batteries as a semi-automated approach has been investigated and implemented to increase flexibility and productivity. Unscrewing is one of the primary operations in EV battery disassembly. This paper presents a new method for the robotic unfastening and collecting of screws, increasing disassembly efficiency and freeing human operators from dangerous, tedious, and repetitive work. The design inspiration for this method originated from how human operators unfasten and grasp screws when disassembling objects with an electric tool, along with the fusion of multimodal perception, such as vision and touch. A robotic disassembly system for screws is introduced, which involves a collaborative robot, an electric spindle, a screw collection device, a 3D camera, a si<i>x</i>-axis force/torque sensor, and other components. The process of robotic unfastening and collecting screws is proposed by using position and force control. Experiments were carried out to validate the proposed method. The results demonstrate that the screws in EV batteries can be automatically identified, located, unfastened, and removed, indicating potential for the proposed method in the disassembly of EoL EV batteries.</p>","PeriodicalId":8907,"journal":{"name":"Biomimetics","volume":"10 8","pages":""},"PeriodicalIF":3.9000,"publicationDate":"2025-08-21","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12383408/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Biomimetics","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.3390/biomimetics10080553","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
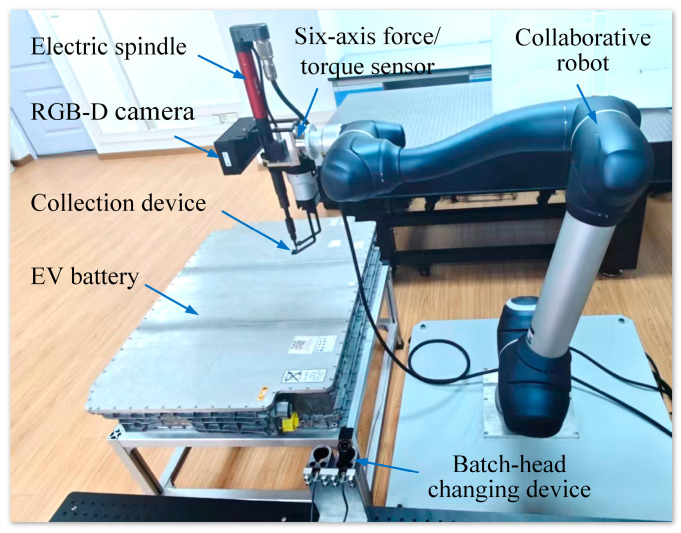
The recycling and remanufacturing of end-of-life (EoL) electric vehicle (EV) batteries are urgent challenges for a circular economy. Disassembly is crucial for handling EoL EV batteries due to their inherent uncertainties and instability. The human-robot collaborative disassembly of EV batteries as a semi-automated approach has been investigated and implemented to increase flexibility and productivity. Unscrewing is one of the primary operations in EV battery disassembly. This paper presents a new method for the robotic unfastening and collecting of screws, increasing disassembly efficiency and freeing human operators from dangerous, tedious, and repetitive work. The design inspiration for this method originated from how human operators unfasten and grasp screws when disassembling objects with an electric tool, along with the fusion of multimodal perception, such as vision and touch. A robotic disassembly system for screws is introduced, which involves a collaborative robot, an electric spindle, a screw collection device, a 3D camera, a six-axis force/torque sensor, and other components. The process of robotic unfastening and collecting screws is proposed by using position and force control. Experiments were carried out to validate the proposed method. The results demonstrate that the screws in EV batteries can be automatically identified, located, unfastened, and removed, indicating potential for the proposed method in the disassembly of EoL EV batteries.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


