{"title":"Migratory Bird-Inspired Adaptive Kalman Filtering for Robust Navigation of Autonomous Agricultural Planters in Unstructured Terrains.","authors":"Zijie Zhou, Yitao Huang, Jiyu Sun","doi":"10.3390/biomimetics10080543","DOIUrl":null,"url":null,"abstract":"<p><p>This paper presents a bionic extended Kalman filter (EKF) state estimation algorithm for agricultural planters, inspired by the bionic mechanism of migratory birds navigating in complex environments, where migratory birds achieve precise localization behaviors by fusing multi-sensory information (e.g., geomagnetic field, visual landmarks, and somatosensory balance). The algorithm mimics the migratory bird's ability to integrate multimodal information by fusing laser SLAM, inertial measurement unit (IMU), and GPS data to estimate the position, velocity, and attitude of the planter in real time. Adopting a nonlinear processing approach, the EKF effectively handles nonlinear dynamic characteristics in complex terrain, similar to the adaptive response of a biological nervous system to environmental perturbations. The algorithm demonstrates bio-inspired robustness through the derivation of the nonlinear dynamic teaching model and measurement model and is able to provide high-precision state estimation in complex environments such as mountainous or hilly terrain. Simulation results show that the algorithm significantly improves the navigation accuracy of the planter in unstructured environments. A new method of bio-inspired adaptive state estimation is provided.</p>","PeriodicalId":8907,"journal":{"name":"Biomimetics","volume":"10 8","pages":""},"PeriodicalIF":3.9000,"publicationDate":"2025-08-19","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12383965/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Biomimetics","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.3390/biomimetics10080543","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
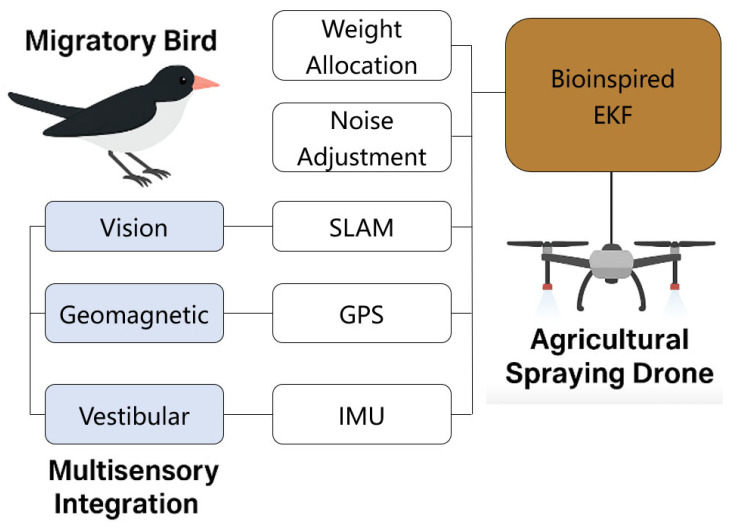
This paper presents a bionic extended Kalman filter (EKF) state estimation algorithm for agricultural planters, inspired by the bionic mechanism of migratory birds navigating in complex environments, where migratory birds achieve precise localization behaviors by fusing multi-sensory information (e.g., geomagnetic field, visual landmarks, and somatosensory balance). The algorithm mimics the migratory bird's ability to integrate multimodal information by fusing laser SLAM, inertial measurement unit (IMU), and GPS data to estimate the position, velocity, and attitude of the planter in real time. Adopting a nonlinear processing approach, the EKF effectively handles nonlinear dynamic characteristics in complex terrain, similar to the adaptive response of a biological nervous system to environmental perturbations. The algorithm demonstrates bio-inspired robustness through the derivation of the nonlinear dynamic teaching model and measurement model and is able to provide high-precision state estimation in complex environments such as mountainous or hilly terrain. Simulation results show that the algorithm significantly improves the navigation accuracy of the planter in unstructured environments. A new method of bio-inspired adaptive state estimation is provided.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


