{"title":"Development of a Magnetically-Actuated Capsule Robot for Biopsy Sampling Using SMA","authors":"Hao Zhang, Keding Luo, Feihao Wang, Shishi Li, Xianghe Meng, Hui Xie","doi":"10.1007/s42235-025-00734-4","DOIUrl":null,"url":null,"abstract":"<div><p>Capsule Robots (CRs) with active locomotion improve on the inefficiency of passive locomotion in capsule endoscopes, showing great potential for clinical use. However, despite the development of various CR types, efficient locomotion and functional integration remain challenges due to space limitations and increasing demands. Additionally, many CRs are overly complex, so simplifying their structure while maintaining functionality is essential. This paper presents a novel magnetically actuated CR with two internal permanent magnets for oscillating locomotion and anchoring, along with a Shape Memory Alloy (SMA)-driven actuator for biopsy sampling. Compared to existing CRs, this design simplifies the structure while ensuring biopsy functionality and leaving space for a micro-CCD. The robot’s dynamics are modeled to guide its structural design and locomotion strategy. SMA characteristics are also examined to optimize the biopsy module’s parameters, improving efficiency and success rates. The CR undergoes experiments to assess safety, locomotion performance, and functionality, with results showing stable steering, and advantages in driving height, speed, and accuracy. Finally, the CR’s biopsy capabilities are validated in a gastric model and ex vivo stomach. This work offers a novel solution for gastrointestinal disease diagnosis and treatment, enhancing the application of CRs in biomedical engineering.</p></div>","PeriodicalId":614,"journal":{"name":"Journal of Bionic Engineering","volume":"22 4","pages":"1609 - 1621"},"PeriodicalIF":5.8000,"publicationDate":"2025-07-06","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Bionic Engineering","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s42235-025-00734-4","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
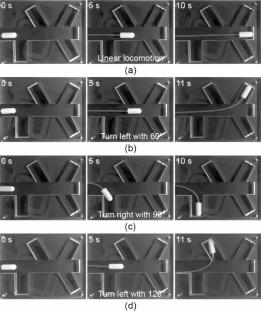
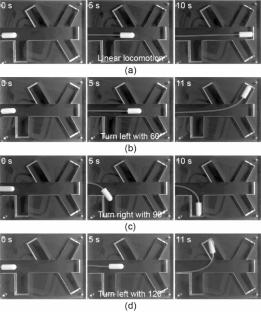
Capsule Robots (CRs) with active locomotion improve on the inefficiency of passive locomotion in capsule endoscopes, showing great potential for clinical use. However, despite the development of various CR types, efficient locomotion and functional integration remain challenges due to space limitations and increasing demands. Additionally, many CRs are overly complex, so simplifying their structure while maintaining functionality is essential. This paper presents a novel magnetically actuated CR with two internal permanent magnets for oscillating locomotion and anchoring, along with a Shape Memory Alloy (SMA)-driven actuator for biopsy sampling. Compared to existing CRs, this design simplifies the structure while ensuring biopsy functionality and leaving space for a micro-CCD. The robot’s dynamics are modeled to guide its structural design and locomotion strategy. SMA characteristics are also examined to optimize the biopsy module’s parameters, improving efficiency and success rates. The CR undergoes experiments to assess safety, locomotion performance, and functionality, with results showing stable steering, and advantages in driving height, speed, and accuracy. Finally, the CR’s biopsy capabilities are validated in a gastric model and ex vivo stomach. This work offers a novel solution for gastrointestinal disease diagnosis and treatment, enhancing the application of CRs in biomedical engineering.
期刊介绍:
The Journal of Bionic Engineering (JBE) is a peer-reviewed journal that publishes original research papers and reviews that apply the knowledge learned from nature and biological systems to solve concrete engineering problems. The topics that JBE covers include but are not limited to:
Mechanisms, kinematical mechanics and control of animal locomotion, development of mobile robots with walking (running and crawling), swimming or flying abilities inspired by animal locomotion.
Structures, morphologies, composition and physical properties of natural and biomaterials; fabrication of new materials mimicking the properties and functions of natural and biomaterials.
Biomedical materials, artificial organs and tissue engineering for medical applications; rehabilitation equipment and devices.
Development of bioinspired computation methods and artificial intelligence for engineering applications.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


