Ultrafast beam steering with microradian tracking accuracy via feedforward tuning and real-time error compensation
IF 4.6
2区 计算机科学
Q1 AUTOMATION & CONTROL SYSTEMS
引用次数: 0
Abstract
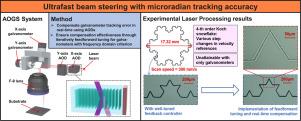
Beam steering is crucial in laser precision manufacturing, as its deflection range, response time, and accuracy of beam steering significantly affect the production scale, throughput, and quality. Recent advancements focus on integrating galvanometer scanners and acousto-optic deflectors (AODs) into a cascaded acousto-optic and galvanometric scanning (AOGS) system, which offers both large deflection ranges and ultrafast response times. However, the tracking accuracy of the AOGS system remains constrained by the mechanical inertia of galvanometers. This study addresses this limitation by utilizing AODs to compensate for the tracking error of galvanometers in real time, with the compensation effectiveness achieved through the synchronization of the AOGS system and the implementation of a novel frequency-domain iterative feedforward tuning (FD-IFFT) method. Specifically, the synchronization of the AOGS system enables the real-time compensation with the AODs. The FD-IFFT method achieves both high tracking accuracy and strong generalization to diverse trajectories, consistently maintaining the galvanometer tracking errors within the compensatory range of the AODs. Experimental results demonstrate that this approach enables beam steering with a response time below 10 s, a tracking accuracy of single-digit microradians, and a sub-radian scanning range. Compared to existing AOGS systems, the proposed approach further enhances tracking accuracy and offers considerable potential for high-speed, high-precision, and large-scale laser direct processing.
通过前馈调谐和实时误差补偿实现微度跟踪精度的超快波束控制
光束转向在激光精密制造中起着至关重要的作用,光束转向的偏转范围、响应时间和精度对生产规模、吞吐量和质量有着重要的影响。最近的进展集中在将振镜扫描仪和声光偏转器(aod)集成到一个级联声光和振镜扫描(AOGS)系统中,该系统提供了大偏转范围和超快的响应时间。然而,AOGS系统的跟踪精度仍然受到振镜的机械惯性的限制。本研究利用AODs实时补偿振镜的跟踪误差,并通过AODs系统的同步和一种新的频域迭代前馈调谐(FD-IFFT)方法实现补偿效果,解决了这一限制。具体来说,AOGS系统的同步性实现了与aod的实时补偿。FD-IFFT方法实现了高跟踪精度和对不同轨迹的强泛化,使振镜跟踪误差始终保持在aod的补偿范围内。实验结果表明,该方法可实现响应时间小于10 μs、跟踪精度为个位数微弧度和亚弧度扫描范围的波束导向。与现有的AOGS系统相比,该方法进一步提高了跟踪精度,并为高速、高精度和大规模激光直接加工提供了可观的潜力。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Control Engineering Practice
工程技术-工程:电子与电气
CiteScore
9.20
自引率
12.20%
发文量
183
审稿时长
44 days
期刊介绍:
Control Engineering Practice strives to meet the needs of industrial practitioners and industrially related academics and researchers. It publishes papers which illustrate the direct application of control theory and its supporting tools in all possible areas of automation. As a result, the journal only contains papers which can be considered to have made significant contributions to the application of advanced control techniques. It is normally expected that practical results should be included, but where simulation only studies are available, it is necessary to demonstrate that the simulation model is representative of a genuine application. Strictly theoretical papers will find a more appropriate home in Control Engineering Practice''s sister publication, Automatica. It is also expected that papers are innovative with respect to the state of the art and are sufficiently detailed for a reader to be able to duplicate the main results of the paper (supplementary material, including datasets, tables, code and any relevant interactive material can be made available and downloaded from the website). The benefits of the presented methods must be made very clear and the new techniques must be compared and contrasted with results obtained using existing methods. Moreover, a thorough analysis of failures that may happen in the design process and implementation can also be part of the paper.
The scope of Control Engineering Practice matches the activities of IFAC.
Papers demonstrating the contribution of automation and control in improving the performance, quality, productivity, sustainability, resource and energy efficiency, and the manageability of systems and processes for the benefit of mankind and are relevant to industrial practitioners are most welcome.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


