Design and motion analysis of a simple screw driven in-pipe inspection robot base on adaptive variable pitch
IF 5.2
2区 计算机科学
Q1 AUTOMATION & CONTROL SYSTEMS
引用次数: 0
Abstract
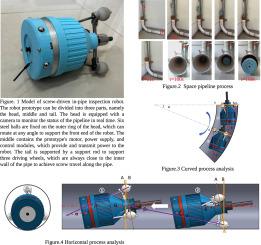
In-pipe inspection robot (IPIR) play an important role in detecting the quality of the inner walls of oil and gas transportation pipelines and urban pipelines. However, due to the complex structure of the pipeline, robot is required to have adaptability. The currently existing screw driven pipeline robot has a fixed pitch, and the robot passively and rigidly pass through pipeline curvature. This article designs a simple adaptive variable pitch pipeline robot. The robot is driven by an electric motor and has simple motion control. The robot consists of a rotor that can adapt to changes in pipeline diameter and a stator with fixed dimensions. The robot adapts through pipeline curvature by continuously adjusting the pitch. The robot is equipped with a wide-angle lens and transmits quality images of the inner wall of the pipeline through Wi-Fi. Through theoretical analysis and model experiments, the robot can smoothly pass through vertical pipes with a diameter of 160 mm and 90-degree pipeline curvature.
基于自适应变螺距的简易螺杆管件检测机器人的设计与运动分析
管道内检测机器人(IPIR)在油气输送管道和城市管道内壁质量检测中发挥着重要作用。然而,由于管道结构复杂,要求机器人具有适应性。现有的螺杆驱动管道机器人具有固定螺距,机器人被动、刚性地通过管道曲率。本文设计了一种简单的自适应变螺距管道机器人。该机器人由电动机驱动,具有简单的运动控制。该机器人由能够适应管道直径变化的转子和固定尺寸的定子组成。机器人通过不断调整俯仰来适应管道曲率。该机器人配备了广角镜头,通过Wi-Fi传输管道内壁的高质量图像。通过理论分析和模型实验,该机器人可以顺利通过直径为160 mm、管道曲率为90度的垂直管道。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Robotics and Autonomous Systems
工程技术-机器人学
CiteScore
9.00
自引率
7.00%
发文量
164
审稿时长
4.5 months
期刊介绍:
Robotics and Autonomous Systems will carry articles describing fundamental developments in the field of robotics, with special emphasis on autonomous systems. An important goal of this journal is to extend the state of the art in both symbolic and sensory based robot control and learning in the context of autonomous systems.
Robotics and Autonomous Systems will carry articles on the theoretical, computational and experimental aspects of autonomous systems, or modules of such systems.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


