Bioarchitectonics-inspired soft grippers with cutaneous slip perception
IF 12.5
1区 综合性期刊
Q1 MULTIDISCIPLINARY SCIENCES
引用次数: 0
Abstract
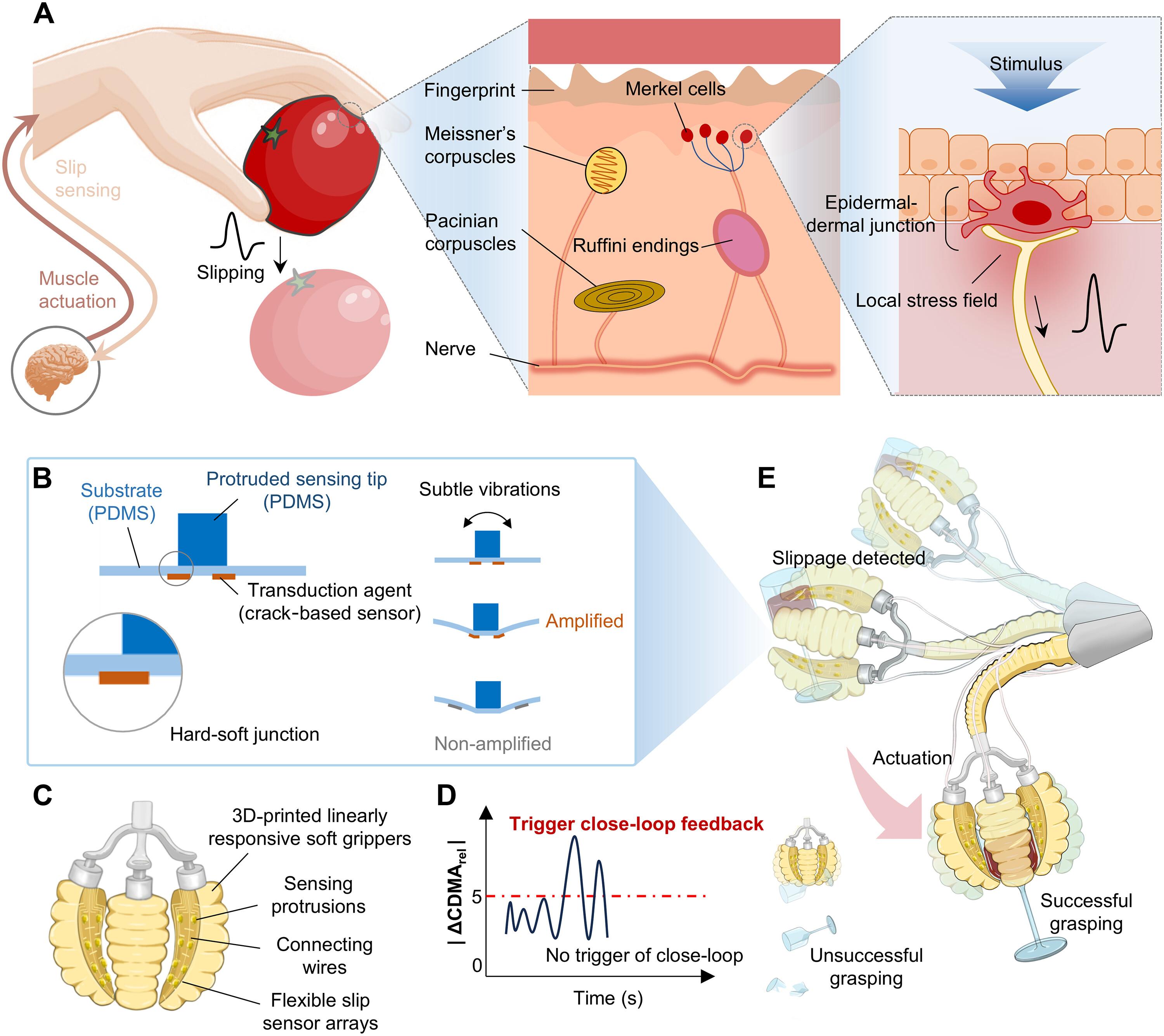
The growing demand for dexterous and autonomous robotic manipulation highlights the need for advanced sensing and control strategies, particularly for slip prevention. Although soft grippers provide intrinsic compliance and adaptability, their effectiveness is often limited by the lack of real-time sensory feedback and the complexity of soft actuator dynamics. Inspired by human tactile perception, we developed a bioarchitectonics-inspired soft slip sensor with a three-dimensional structure that leverages crack and stress concentration to enhance sensitivity to incipient slip and shear force. Complementarily, a soft gripper with a linear pressure-to-force response was engineered to enable stable and predictable force modulation. The flexible slip sensors were conformally integrated onto the grippers, forming a fully perceptive soft robotic system capable of detecting early-stage slippage and investigating interfacial frictional properties. This integration establishes a closed-loop sensorimotor framework that notably improves the reliability and adaptability of soft robotic grasping across a wide range of real-world applications.
具有皮肤滑动感知的生物建筑学启发的软夹持器
对灵巧和自主机器人操作日益增长的需求突出了对先进传感和控制策略的需求,特别是在防滑方面。虽然软抓取器具有内在的顺应性和适应性,但其有效性往往受到缺乏实时感官反馈和软执行器动力学复杂性的限制。受人类触觉感知的启发,我们开发了一种受生物建筑学启发的软滑移传感器,该传感器具有三维结构,利用裂纹和应力集中来增强对早期滑移和剪切力的敏感性。此外,设计了一个具有线性压力-力响应的软夹持器,以实现稳定和可预测的力调制。柔性滑移传感器以保形形式集成到夹具上,形成了一个完全感知的软机器人系统,能够检测早期滑移并研究界面摩擦特性。这种集成建立了一个闭环感觉运动框架,显著提高了软机器人在广泛的现实世界应用中的可靠性和适应性。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Science Advances
综合性期刊-综合性期刊
CiteScore
21.40
自引率
1.50%
发文量
1937
审稿时长
29 weeks
期刊介绍:
Science Advances, an open-access journal by AAAS, publishes impactful research in diverse scientific areas. It aims for fair, fast, and expert peer review, providing freely accessible research to readers. Led by distinguished scientists, the journal supports AAAS's mission by extending Science magazine's capacity to identify and promote significant advances. Evolving digital publishing technologies play a crucial role in advancing AAAS's global mission for science communication and benefitting humankind.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


