A dual-layer UAV-assisted mobile edge computing system for disaster rescue: Coordinated optimization of coverage, obstacle-avoidance path planning and task offloading
IF 4.8
3区 计算机科学
Q1 COMPUTER SCIENCE, INFORMATION SYSTEMS
引用次数: 0
Abstract
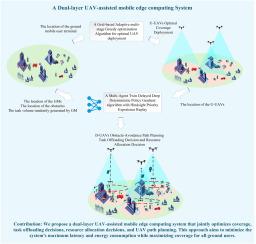
This study addresses critical challenges in urban disaster rescue operations, such as fires, including communication failures, complex environments, and information scarcity. We propose a novel Dual-layer UAV-assisted Mobile Edge Computing (DUAMEC) system, leveraging an air–space–ground collaborative communication framework and intelligent task scheduling to overcome traditional limitations like information blind spots, decision-making delays, and inefficient response. DUAMEC innovatively combines a high-altitude upper-layer UAV (U-UAV) for wide-area coverage and a low-altitude down-layer UAV (D-UAV) for task processing, achieving strong coverage, low latency, and high energy efficiency. The core innovations of the DUAMEC system are manifested in the following aspects: First, we propose a grid-based adaptive multi-stage greedy optimization algorithm for optimal UAV deployment, dynamically generating multi-level candidate grids and employing adaptive step-size contraction. An uncovered-point compensation mechanism ensures continuous area coverage. Second, we design a Multi-Agent TD3 with Hindsight Priority Experience Replay (MATD3-HP) algorithm, utilizing a multi-dimensional state space and compound reward mechanism to optimize resource allocation, path planning, and task offloading in dynamic obstacle environments. Experimental results demonstrate that compared to conventional single-layer UAV-MEC systems and fixed path planning schemes, the DUAMEC system achieves an 66.78% reduction in system overhead while maintaining 98% user coverage. Simultaneously, it sustains stable performance with low task processing latency and energy consumption even in scenarios with dense user distribution and highly dynamic obstacles, thereby providing an efficient and reliable intelligent solution for urban disaster rescue operations.
一种用于灾害救援的双层无人机辅助移动边缘计算系统:覆盖、避障路径规划和任务卸载协同优化
本研究解决了城市灾害救援行动中的关键挑战,如火灾,包括通信故障、复杂环境和信息稀缺。我们提出了一种新型的双层无人机辅助移动边缘计算(DUAMEC)系统,利用空-空-地协同通信框架和智能任务调度来克服传统的限制,如信息盲点、决策延迟和低效响应。DUAMEC创新地将高空高空无人机(U-UAV)用于广域覆盖和低空低层无人机(D-UAV)用于任务处理,实现了强覆盖、低延迟和高能效。DUAMEC系统的核心创新体现在以下几个方面:首先,我们提出了一种基于网格的自适应多阶段贪婪优化算法,用于无人机的最优部署,动态生成多级候选网格并采用自适应步长收缩。未覆盖点补偿机制确保连续覆盖区域。其次,我们设计了一种具有后见优先体验重放(MATD3-HP)算法的多智能体TD3,利用多维状态空间和复合奖励机制来优化动态障碍环境下的资源分配、路径规划和任务卸载。实验结果表明,与传统的单层无人机- mec系统和固定路径规划方案相比,DUAMEC系统在保持98%用户覆盖率的同时,系统开销降低了66.78%。同时,即使在用户分布密集、动态障碍物高的场景下,也能保持较低的任务处理时延和能耗,性能稳定,为城市灾害救援行动提供高效可靠的智能解决方案。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Ad Hoc Networks
工程技术-电信学
CiteScore
10.20
自引率
4.20%
发文量
131
审稿时长
4.8 months
期刊介绍:
The Ad Hoc Networks is an international and archival journal providing a publication vehicle for complete coverage of all topics of interest to those involved in ad hoc and sensor networking areas. The Ad Hoc Networks considers original, high quality and unpublished contributions addressing all aspects of ad hoc and sensor networks. Specific areas of interest include, but are not limited to:
Mobile and Wireless Ad Hoc Networks
Sensor Networks
Wireless Local and Personal Area Networks
Home Networks
Ad Hoc Networks of Autonomous Intelligent Systems
Novel Architectures for Ad Hoc and Sensor Networks
Self-organizing Network Architectures and Protocols
Transport Layer Protocols
Routing protocols (unicast, multicast, geocast, etc.)
Media Access Control Techniques
Error Control Schemes
Power-Aware, Low-Power and Energy-Efficient Designs
Synchronization and Scheduling Issues
Mobility Management
Mobility-Tolerant Communication Protocols
Location Tracking and Location-based Services
Resource and Information Management
Security and Fault-Tolerance Issues
Hardware and Software Platforms, Systems, and Testbeds
Experimental and Prototype Results
Quality-of-Service Issues
Cross-Layer Interactions
Scalability Issues
Performance Analysis and Simulation of Protocols.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


